23 силовой привод глава бурового комплекса
23 СИЛОВОЙ ПРИВОД
23.1. ТИПЫ ПРИВОДОВ, ИХ ХАРАКТЕРИСТИКИ
Силовым приводом бурового комплекса называют совокупность двигателей и регулирующих их работу устройств, осуществляющих преобразование топливной или электрической энергии в механическую, управление преобразованной механической энергией и передачу ее к исполнительным органам буровой установки (насосу, ротору, лебедке и др.).
В зависимости от используемого первичного источника энергии приводы подразделяют на автономные (не зависящие от системы энергоснабжения) и неавтономные (зависящие от системы энергоснабжения, т.е. с питанием от промышленных электрических сетей). К автономным приводам буровых установок относят установки с двигателями внутреннего сгорания (ДВС), а также с газотурбинными установками. К неавтономным приводам относят установки с электродвигателями трехфазного переменного тока.
В зависимости от способа привода исполнительных органов силовой привод буровой установки может быть одиночным или групповым. В силовых приводах можно использовать разные средства искусственной приспособляемости; передаточные механизмы, блокирующие несколько двигателей для передачи энергии на один вал и также входящие в состав силового привода. Характеристики группового привода одновременно должны соответствовать характеристикам нескольких механизмов буровой установки, а характеристика одиночного привода — характеристике только одного механизма.
Потребителями энергии буровой установки являются исполнительные механизмы, обладающие различными характеристиками:
исполнительные механизмы для углубления скважины (буровые и подпорные насосы, роторный стол, вращающий бурильную колонну и долото при роторном бурении); устройства для приготовления бурового раствора и очистки его от выбуренной породы и газа;
исполнительные механизмы для спускоподъемных операций (лебедки главная и вспомогательная); частота вращения барабана главной лебедки при подъеме изменяется от 50 до 600 мин-1; для лучшего использования мощности требуется бесступенчатое или ступенчатое регулирование частот вращения; при подъеме бурильных колонн идеальна характеристика постоянного использования всей мощности, т.е. N = иМ = const, ю — угловая скорость барабана; M — крутящий момент;
вспомогательные исполнительные механизмы (компрессоры, водяной насос, механизированные ключи и др.); мощность, потребляемая этими механизмами, составляет 10—15 % мощности, потребляемой главными механизмами.
Основные требования, предъявляемые к силовому приводу: соответствие мощности и гибкости характеристики условиям работы исполнительных механизмов, достаточная надежность, долговечность, небольшая масса и экономическая эффективность.
Под мощностью силового привода подразумевают номинальную установленную мощность всех двигателей N = ZN;; где N - номинальная мощность двигателя, кВт.
Под гибкостью характеристики понимают способность силового привода автоматически или при участии оператора быстро приспосабливаться в процессе работы к изменениям нагрузок и частот вращения исполнительных механизмов. Гибкость характеристики определяется коэффициентом приспособляемости, диапазоном собственного регулирования, частотой вращения валов силового привода и приемистостью двигателей.
Приемистостью называют интенсивность протекания переходных процессов, т.е. время, в течение которого двигатель и силовой привод реагируют на изменение нагрузки.
Коэффициент приспособляемости (или перегрузочная способность) -это отношение кп =Mmax/MH, где Mmax и Мн - наибольший и номинальный крутящие моменты.
Диапазон регулирования частоты вращения - отношение максимальной частоты вращения nmax к номинальной пн.
Если в силовой привод входят и средства искусственной приспособляемости, то его коэффициент приспособляемости кп = кпд кп.т, а диапазон регулирования R = ЯдЯт, где кпд и Rд - коэффициент перегрузки и диапазон собственного регулирования двигателя в пределах устойчивых режимов работы; кп.т и Rx - то же, для средств искусственной приспособляемости, входящих в силовой привод.
Коэффициенты кпд и Rд зависят от типа двигателя и вида используемой энергии (табл. 23.1). Если значения кпд и Rд недостаточны, то применяют средства искусственной приспособляемости, т.е. между двигателями и исполнительным механизмом включают промежуточные гидравлические или электромашинные передачи.
Относительная масса двигателя, или масса, приходящаяся на 1 кВт, влияет на мобильность буровой установки. Относительная масса для двигателей, применяемых в буровых установках, колеблется от 2 до 15 кг на 1 кВт. Практикой бурения установлено, что для тяжелых и мощных буровых установок наиболее подходят двигатели с относительной массой 6-12 кг на 1 кВт.
Экономическую эффективность силовых приводов буровых установок с двигателями разных типов определяют на основании данных эксплуатации или опыта промышленных испытаний установок; экономическая эф-
Таблица 23.1
Значения кпл и R для различных двигателей
| Тип привода | кпд | Rд |
| ДВС тихоходный (500-750 мин-1) ДВС быстроходный (1200- 1700 мин-1) Асинхронный электродвигатель Синхронный электродвигатель Газовая турбина двухвальная Газовая турбина одновальная Комбинированная газовая турбина с двигателем со свободно движущимися поршнями Паровой двигатель буровых установок ДВС быстроходный с турботрансформатором ДВС с электромашинной передачей постоянного тока | 1.1-1,25 1.1- 1,2 1,7-2,2 1,65 2.5-3 1,8-2 3.5-5 1.5-3 1.5 — 3,5 1.6 — 2,2 | 1.5-2 1,3- 1,8 1,0- 1,05 1,0 2-3 1.5-2 4-6 2-3 2.5-3,5 2.5-4,0 |
фективностъ зависит от расхода топлива или энергии, смазочных материалов, их стоимости, коэффициента использования мощности первичных двигателей, затрат на уход и обслуживание, транспортирование, монтаж и демонтаж силовых приводов в буровой установке.
В силовых приводах широко используют асинхронные и синхронные электродвигатели трехфазного переменного тока. Преимущество этого вида привода по сравнению с ДВС в том, что обслуживание гораздо проще, и что при снабжении буровых электроэнергией отпадает необходимость в систематическом подвозе топлива, а это особенно затруднительно в районах с суровым климатом и при большой отдаленности буровых.
Недостатки этих двигателей — жесткость характеристики и необходимость применять средства искусственной приспособляемости. В районах, где нет электросетей большой мощности, применяют буровые установки с ДВС. В последнее время для бурения глубоких скважин шире используют приводы с электродвигателями постоянного тока, применяя системы выпрямителей и питание от сетей трехфазного тока.
Выбор мощности, типа и числа двигателей, способа передачи энергии и схемы компоновки всего силового привода зависит от характера изменения рабочих нагрузок. Использование мощности исполнительными механизмами в процессе проводки скважины, характеристики двигателей и средств искусственной приспособляемости при совместной работе с двигателями обусловлено способом и технологией бурения.
В процессе проводки скважины необходимая мощность, частота вращения и крутящие моменты изменяются на всех исполнительных механизмах в широких пределах. Потребляемая мощность и энергия зависят от глубины и диаметра скважины, способа бурения, типа буровой установки, режима работы, климатических условий и др. По мере углубления скважины возрастает расход энергии, затрачиваемой на каждый пробуренный метр скважины, в результате уменьшения скорости механического бурения, увеличения гидравлического сопротивления прокачиванию жидкости и увеличения веса бурильной колонны и объема спускоподъемных операций.
Режимы работы двигателей непостоянны. Различают три режима работы силового привода: пиковых кратковременных нагрузок с использованием максимальной мощности двигателей (аварийные работы); повторнократковременных нагрузок в период спускоподъемных операций бурильных колонн; длительный, который используют для привода ротора и насосов в процессе бурения.
Пригодность двигателя того или иного типа и необходимых средств искусственной приспособляемости для привода буровой установки определяется их характеристиками и технико-экономическими показателями. При выборе типа двигателей, способа передачи энергии к исполнительным органам и при разработке схемы компоновки всего силового привода следует подбирать сочетание характеристик и этих показателей так, чтобы возможно полнее удовлетворить требованиям бурения, монтажа и демонтажа оборудования. В зависимости от этих факторов выбирают схему и конструкцию всех передач, приводящих лебедку, насосы, ротор и другие агрегаты, чтобы обеспечить их наиболее эффективное использование. Для решения этой задачи должны быть известны характеристики основных исполнительных органов, двигателей и трансмиссий.
ДВИГАТЕЛИ ВНУТРЕННЕГО СГОРАНИЯ
В буровых установках применяют ДВС, эксплуатируемые на тяжелом топливе или газе. Двигатели, работающие на легком топливе (бензине или керосине), не применяют из-за их неэкономичности.
Соответствие ДВС заданным условиям работы определяется его внешней характеристикой и конструкцией. Внешней, или механической, характеристикой ДВС называют изменение мощности, крутящего момента и расхода топлива в зависимости от частоты вращения коленчатого вала.
ДВС могут работать при изменении массового соотношения количеств воздуха и топлива в сравнительно небольшом диапазоне — от 15:1 («бедная» смесь) до 11:1 («богатая» смесь); этим и объясняется, что крутящий момент, развиваемый этими двигателями, почти постоянен. Работу ДВС регулируют изменением подачи топлива. Если подача топлива ограничена и применяется «бедная» смесь, то частота вращения уменьшается и двигатель не развивает полной мощности; такую характеристику называют частичной.
Приемистость и приспособляемость ДВС определяются конструкцией системы подвода топлива и воздуха, а также моментом инерции вращающихся частей шатунно-поршневой группы. Эту группу быстроходных двигателей облегчают, благодаря чему рассматриваемые двигатели имеют большую приемистость, чем тихоходные. С увеличением коэффициента собственной приспособляемости двигателя возрастает устойчивость его работы при переменных режимах нагрузки, что особенно важно для двигателей, приводящих в движение буровые лебедки.
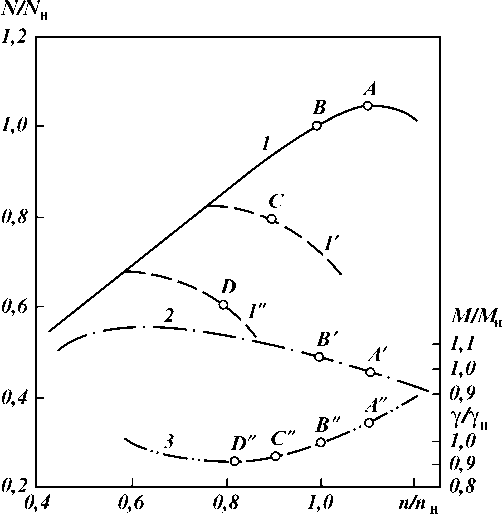
Обычно в заводской характеристике ДВС указывают его номинальную мощность. Номинальной мощностью ДВС называют мощность нового двигателя, полученную во время заводских стендовых испытаний при определенной (номинальной) частоте вращения пн (точка В на рис. 23.1); при этом двигатель развивает номинальный момент (точка В') при номинальном расходе топлива (точка В”) и нормальных окружающих условиях (атмосферное давление 760 мм рт. ст., температура воздуха +20 °С, влажность 70 %).
Согласно нормам для подъемной части буровых установок следует использовать режим работы ДВС при котором он развивает 80 % номинальной мощности (точка С) при меньшем расходе топлива (точка С").
При длительных режимах работы ДВС на приводе насосов и ротора рекомендуют использовать только 60 % номинальной мощности (точка D), что достигается уменьшением подачи топлива, обеспечивающим наиболее экономичный режим работы (точка D”). При форсировании ДВС может развить и большую мощность (точка А). Однако этот режим связан с повышенным расходом топлива (точка А' ) и снижением момента (точка А) вследствие увеличения внутренних потерь в двигателе. При таком режиме срок службы ДВС резко уменьшается и использование его неэкономично. Недостатком ДВС является то, что их нельзя запускать под нагрузкой — необходимо устанавливать в трансмиссиях муфты, позволяющие включать их на ходу; кроме того, мощность двигателя зависит от давления, температуры и влажности окружающего воздуха.
Тепловая энергия, потребляемая ДВС на буровых, составляет 40 —
Рис. 23.1. Внешние характеристики ДВС:
1 - мощность; Г, Г' - мощность при работе на частных характеристиках; 2 - крутящий момент; 3 - удельный расход топлива (N/NH, М/Мн, п/пн, у/ун - соответственно относительные мощ
ность, крутящий момент, частота вращения и расход топлива)
60 МДж/ч при КПД, равном 0,25 — 0,35 (в зависимости от конструкции и состояния двигателя), а часовой расход топлива составляет 250 — 350 г/(кВт-ч).
Наиболее широко распространены дизели с наддувом, однако не любой их тип можно использовать в буровой установке. ДВС должен быть приспособлен к работе на переменных режимах и длительной работе на холостом ходу.
ЭЛЕКТРОДВИГАТЕЛИ
Под внешней, или механической, характеристикой электродвигателя подразумевают зависимость крутящего момента от частоты вращения, напряжения, частоты тока и магнитного потока в якоре.
В каталогах указывают номинальные пусковые и рабочие характеристики, т.е. мощность, крутящий момент, скольжение и КПД двигателя при номинальных напряжениях и частоте переменного тока на клеймах двигателя и температуре окружающей среды 20 °С. Так как мощность двигателя определяется температурой нагрева его обмотки, то в зависимости от температуры окружающей среды и условий охлаждения электродвигатель может развивать мощность, отличающуюся от указанной в каталоге.
В буровых установках для привода главных и вспомогательных исполнительных механизмов применяют электродвигатели следующих типов:
асинхронные трехфазного переменного тока с короткозамкнутым или фазным ротором; синхронные трехфазного переменного тока; постоянного тока с разными схемами возбуждения.
Различают три типа внешних характеристик электродвигателей (рис. 23.2):
Рис. 23.2. Внешние характеристики электродвигателей:
1 - синхронного; 2 - асинхронного; 3 -постоянного тока (А, А' - номинальный момент)
мщ
2,5
0,5
|
V | |
| \ V |
|
| - \ | 1 |
| А’ | |
|
- >0“ | Ь |
|
1 1 1 \ |
0,25 0,50 0,75 1,00 п/п.
2,0
1,65
1,5
абсолютно жесткая (линия 1) -частота вращения при изменении момента постоянна; такую характеристику имеют синхронные электродвигатели;
жесткая (кривая 2) - с увеличением момента частота вращения уменьшается незначительно; такой характеристикой обладают асинхронные двигатели переменного тока и двигатели постоянного тока параллельного и независимого возбужде-" ния;
1,0
О
гибкая (кривая 3) - при небольшом изменении момента значительно изменяется частота вращения; такой характеристикой обладают двигатели постоянного тока последовательного возбуждения.
Частота вращения электродвигателя и развиваемый им момент могут изменяться автоматически без воздействия каких-либо внешних регуляторов; в этом случае автоматическим регулятором является противоэлектро-движущая сила самого двигателя.
Естественные характеристики электрических двигателей можно изменять с помощью регулирующих устройств, на которые воздействует оператор; такие характеристики называют искусственными.
При выборе двигателя для силового привода важно знать, как будут изменяться его основные параметры, т.е. крутящий момент M, частота вращения п и мощность N в зависимости от изменения напряжения и частоты тока в питающей сети.
В асинхронных электродвигателях переменного трехфазного тока параметры изменяются по следующим зависимостям.
Скольжение номинальное
5 = (nc - nH)/nc°
где - nc = 60f /z - синхронная частота вращения, мин-1; f - частота тока (для промышленных сетей f = 50 Гц); z - число пар полюсов.
Крутящий момент M пропорционален квадрату питающего напряжения, поэтому рассматриваемый привод весьма чувствителен к колебаниям напряжения. Максимальный крутящий момент обратно пропорционален квадрату частоты тока сети.
Для силовых приводов буровых установок с питанием от общепромышленных сетей переменного тока при допускаемом колебании напряжения от +5 до - 10 % максимальный момент может уменьшаться до 0,8 номинального, указанного в каталогах. При пуске электродвигателей сила тока увеличивается, а напряжение в сети падает ниже допустимых пределов. В связи с этим асинхронные двигатели должны обладать высокой перегрузочной способностью даже в период падения напряжений и возрас-
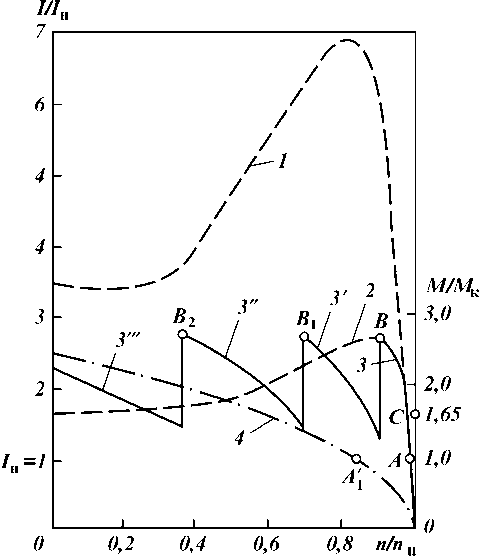
Рис. 23.3. Внешние характеристики асинхронных двигателей переменного трехфазного тока:
1, 2 — сила тока и крутящий момент асинхронного двигателя с короткозамкнутым ротором; 3, 3', 3", 3'" — относительный момент асинхронного двигателя с фазным ротором; 4 — относительный момент асинхронного электродвигателя с повышенным скольжением (///н — относительная сил.а тока)
тания пусковых моментов даже в период падения напряжений и возрастания пусковых моментов сопротивления при относительно небольшой силе пускового тока, при этом они должны развивать необходимый вращающий момент.
На рис. 23.3. приведены внешние номинальные характеристики электродвигателей переменно
го трехфазного тока. Кривая 1 соответствует изменению силы потребляемого тока, кривая 2 — естественному изменению крутящего момента асинхронного двигателя с короткозамкнутым ротором. Пуск такого двигателя производят непосредственно при включении в сеть без промежуточных пусковых устройств. Такие электродвигатели можно применять для привода насосов; для привода лебедки и ротора их используют только с турботрансформаторами или электромагнитными муфтами скольжения и с коробками передач.
Электродвигатель с фазным ротором имеет контактные кольца, что позволяет при пуске вводить ступенчато в цепь ротора добавочные сопротивления, определяющие искусственные характеристики (кривые 3, 3', 3'' , 3''' . Введение добавочного активного сопротивления увеличивает полное сопротивление роторной цепи, благодаря чему снижаются пусковой момент и критическое скольжение. Максимальные моменты остаются неизменными (точки В, Bi и В2). Активное сопротивление в роторной цепи регулируют так, что переключение с одной реостатной характеристики на другую происходило при расчетных значениях моментов переключения. По окончании пуска сопротивление в цепи ротора уменьшают, и двигатель далее работает при параметрах, соответствующих двигателю с короткозамкнутым ротором (кривая 2).
При использовании индуктивного сопротивления в цепи ротора, несмотря на некоторое уменьшение максимального момента, получают лучшие результаты. Индуктивное сопротивление выполняет функцию автоматического регулятора силы тока ротора. В начале разгона двигателя, когда частота тока ротора близка к частоте сети, сопротивление дросселя велико и ограничивает силу пускового тока. По мере разгона частота тока в роторе снижается, сопротивление дросселя уменьшается и сила тока в течение всего периода пуска остается примерно постоянной.
В электродвигателях с фазным ротором можно применять системы управления, в которых дроссель насыщения с внутренней обратной связью в сочетании с активными сопротивлениями симметрично включен в цепь ротора.
В процессе пуска индуктивное сопротивление изменяется под влиянием силы и частоты тока ротора, а при автоматическом управлении — еще и под действием силы результативного тока управления. Активные сопротивления в процессе пуска не изменяются. Кривая 4 изменения момента такого двигателя с повышенным скольжением показана на рис. 23.3; точка А характеризует номинальный крутящий момент Мн двигателя с короткозамкнутым ротором, а точка А1 — двигателя с повышенным скольжением. В двигателях с повышенным скольжением ротор короткозамкнутый, что упрощает пусковую аппаратуру; однако КПД такого двигателя значительно ниже, чем некороткозамкнутого.
Синхронный электродвигатель отличается от асинхронного тем, что он снабжен генератором постоянного тока, служащим для намагничивания ротора; благодаря этому ротор вращается синхронно с частотой вращения, пропорциональной частоте тока и обратно пропорциональной числу пар полюсов. Частоту вращения можно регулировать только изменением частоты питающего напряжения; момент, развиваемый двигателем, пропорционален первой степени напряжения; перегрузочную способность двигателя можно повысить увеличением возбуждения. В двигателях станционарного исполнения Mmax = 1,65 MH (точка С на рис. 23.3).
Ротор синхронного двигателя снабжен также короткозамкнутой обмоткой, и его пусковые характеристики определяются пусковой характеристикой этой обмотки ротора, которая придает синхронному двигателю в режиме пуска свойства асинхронного короткозамкнутого двигателя. Эксплуатационные преимущества синхронного двигателя определяются его способностью отдавать в сеть реактивную мощность, необходимую для повышения cos ф. Однако абсолютно жесткая механическая характеристика двигателя и невозможность пуска под нагрузкой ограничивают его использование. К недостаткам асинхронных двигателей следует отнести также большую силу пускового тока, однако при достаточно мощных промысловых сетях и подстанциях осуществляют прямой пуск этих двигателей. Пусковые характеристики синхронных и асинхронных двигателей аналогичны.
Электродвигатели постоянного тока следует применять в буровых установках для бурения скважин большой глубины, когда к приводу предъявляют требования глубокого и плавного регулирования частоты вращения, точной остановки, повышенной плавности разгона и торможения и других режимов со сложным изменением механической характеристики.
В буровых установках электродвигатели постоянного тока применяют с автономным приводом в сочетании с генераторами постоянного тока, вращаемыми ДВС (электромашинная передача постоянного тока) либо двигатели постоянного тока получают питание через выпрямители от сетей переменного тока.
Частоту вращения двигателей постоянного тока регулируют изменением напряжения в якоре или силы тока возбуждения двигателя. Поскольку для изменения напряжения на зажимах якоря в электромашинной передаче необходимо изменять силу тока возбуждения генератора, управление двигателями постоянного тока осуществляют в цепях возбуждения, т.е. в цепях сравнительно малой мощности.
Характеристики двигателей постоянного тока зависят от способа возбуждения. Различают три основных способа возбуждения двигателей постоянного тока: параллельное, последовательное и комбинированное (смешанное).
На рис. 23.4 приведены внешние характеристики при разных способах возбуждения. При параллельном возбуждении (кривая 1) с изменением нагрузки магнитный поток не изменяется, поэтому пределы регулирования и характеристика определяются сопротивлением цепи якоря. При последовательном (сериесном) возбуждении (кривая 2) магнитный поток зависит от силы тока нагрузки; в этом случае механическая характеристика зависит от магнитного потока и сопротивления в цепи якоря. При смешанном возбуждении (кривая 3) суммарный магнитный поток, действующий в электродвигателе, определяется двумя составляющими: постоянной, создаваемой обмоткой параллельного возбуждения, и переменной, создаваемой обмоткой последовательного возбуждения.
В буровых установках применяют электродвигатели с последовательным или смешанным возбуждением, которые должны отвечать следующим требованиям: частота вращения для привода всех агрегатов 400 —
1200 мин-1; диапазон регулирования лебедки и ротора 2 — 3, для привода насосов 1,5 — 2. Мощность одного двигателя для лебедки и насосов 300 — 1000 кВт, для ротора 250 — 700 кВт.
ГАЗОТУРБИННЫЕ ДВИГАТЕЛИ
Газотурбинные двигатели (ГТУ) обладают хорошей приемистостью, большой надежностью и высокой естественной приспособляемостью. Газотурбинные двигатели бывают двухвальные, одновальные и комбинированные.
В двухвальном газотурбинном двигателе турбина высокого давления приводит во вращение центробежный компрессор; в силовую турбину низкого давления, находящуюся на отдельном валу, поступает газ из турбины высокого давления. Независимость питания газом этих турбин позволяет изменять характеристику двигателя в широких пределах.
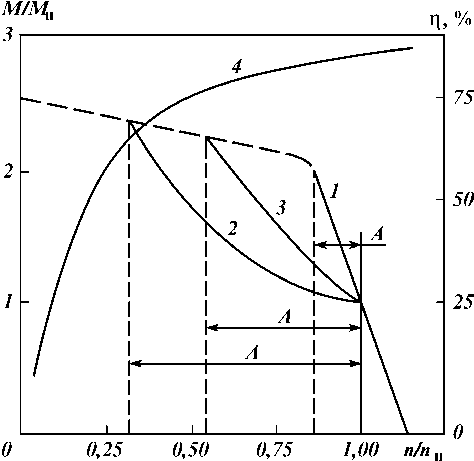
Рис. 23.4. Внешние характеристики электродвигателей постоянного тока с разными способами возбуждения:
1 — параллельным; 2 — последовательным; 3 — смешанным; 4 — КПД двигателя с последовательным возбуждением (п — КПД; А — рабочий диапазон)
В одновальных газовых турбинах компрессор и турбину располагают на одном валу. При увеличении внешней нагрузки снижаются частота вращения и количество газа, питающего турбину, в результате уменьшаются мощность и крутящий момент.
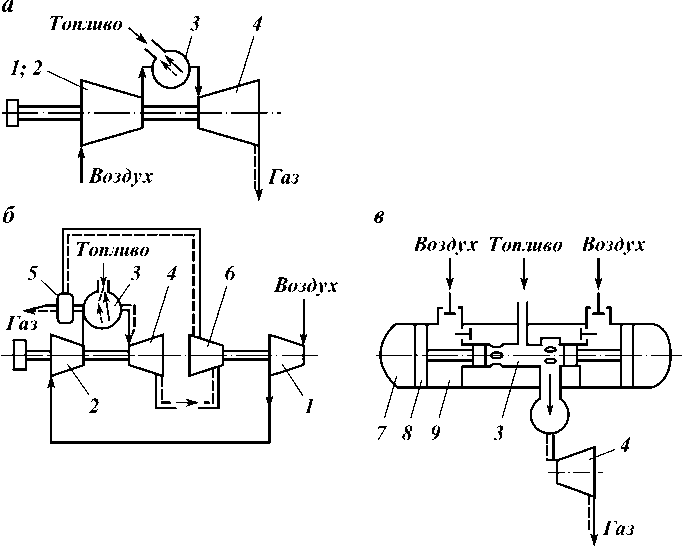
Рис. 23.5. Схемы газотурбинных установок (ГТУ):
а - одновальная; б - двухвальная; в - с генератором и свободно движущимися поршнями; 1, 2
- компрессоры низкого и высокого давления; 3
- камера сгорания; 4, 6 - трубы низкого и высокого давления; 7 - воздушная камера; 8 - поршень; 9 - камера сжатия
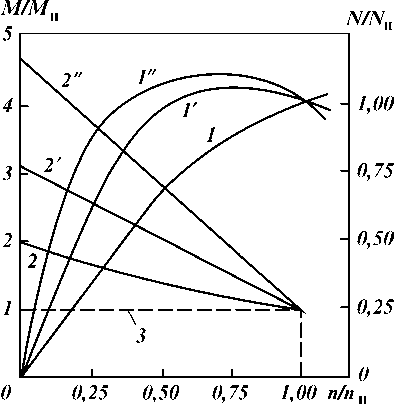
Рис. 23.6. Внешние характеристики (мощность и крутящий момент) ГТУ:
1, 2 - одновальной; Г, 2' - двухвальной; Г', 2" -комбинированной; 3 - номинальный крутящий момент
Комбинированный газотурбинный двигатель состоит из генератора газа со свободно движущимися поршнями и одновальной газовой турбины. Генератор газа имеет поршневой компрессор, поршни которого непосредственно соединены с поршнями двухтактного дизеля. Сжимаемый в поршневом компрессоре воздух через всасывающие окна подается в цилиндр дизеля, куда подводится топливо. Отработанные газы дизеля при большом давлении подаются через продувочные окна в газовую турбину, передающую мощность на исполнительный механизм.
На рис. 23.5 приведены схемы ГТУ, а на рис. 23.6 - их характеристики. Двухвальная ГТУ обладает большим коэффициентом естественной приспособляемости, чем одновальная, и имеет большую приемистость. Одно-вальные ГТУ обладают меньшим диапазоном естественного регулирования. Наибольший диапазон регулирования и высокий коэффициент естественной приспособляемости имеют комбинированные газотурбинные двигатели со свободно движущимися поршнями генератора газа, так как в них питание газом турбины не зависит от ее частоты вращения.
Приемистость газотурбинных двигателей зависит от схемы, конструктивного исполнения и программы регулирования подачи топлива.
Теоретически время переходных процессов можно определить с помощью уравнений термодинамики. Практически для двигателей без регенератора время перехода от холостого хода к полной нагрузке составляет несколько секунд, что вполне приемлемо для двигателя силового привода буровой установки.
Недостаток ГТУ - их низкий КПД. Одно- и двухвальные ГТУ характеризуются эффективным КПД, имеющим более низкое значение (0,12 — 0,27), чем КПД двигателей внутреннего сгорания (0,36-0,38). Комбинированные ГТУ имеют более высокий КПД, чем одно- и двухвальные, и близкий к КПД дизелей (0,35-0,38). На холостом ходу и при незначительных нагрузках КПД одно- и двухвальных установок очень низкий, что служит препятствием для широкого применения их в буровых установках.
23.3. СРЕДСТВА ИСКУССТВЕННОЙ
ПРИСПОСОБЛЯЕМОСТИ ДЛЯ ПРИВОДОВ
Естественные характеристики двигателей в большинстве случаев не могут обеспечить пусковую характеристику и диапазон регулирования, требуемые исполнительными механизмами буровой установки. Поэтому используют искусственные средства сближения требуемых характеристик с фактически имеющимися.
Крутящий момент и диапазон регулирования частот вращения лебедки и ротора в буровой установке можно изменять в пределах от 1-4 до 1-10. Ни один из рассмотренных двигателей не обладает такой характеристикой собственной приспособляемости, поэтому в трансмиссиях буровых установок применяют различные устройства искусственной приспособляемости, позволяющие трансформировать крутящий момент и частоту вращения.
Трансмиссии буровых установок можно подразделить на механические нерегулируемые или со струпенчатым регулированием частот вращения и моментов с помощью коробок передач; гидромеханические со ступенчатым или бесступенчатым регулированием частот вращения и моментов с помощью гидропередач и коробок передач; электромеханические со ступенчатым или бесступенчатым регулированием частот вращения и моментов с помощью электродинамических муфт или электромашинной передачи с коробками передач; электрические с бесступенчатым регулированием частот вращения и моментов во всем требуемом диапазоне.
Обозначим индексом 1 вал двигателя, а индексом 2 — ведомый (вторичный) вал трансмиссии. Тогда для любой трансмиссии можно записать следующее.
Коэффициент полезного действия трансмиссии
П = М1л2/(М1л1), (23.1)
где M1, M2 — крутящий момент на ведущем и ведомом валах; n1, n2 — частота вращения этих валов.
Отношение u21 = n2/n1 называется передаточным отношением трансмиссии, а отношение моментов k = M2/M1 — коэффициентом трансформации крутящего момента.
Следовательно, всегда КПД п = ku21.
В любой трансмиссии приложены три крутящих момента: момент двигателя M1, рабочий момент М2 и опорный момент M3. Из условия равновесия трансмиссии алгебраическая сумма трех крутящих моментов равна нулю:
M1 + M2 + M3 = 0. (23.2)
Трансмиссии без внешней опоры (M3 = 0) называют муфтами. Независимо от принципов их действия для них M1 = M2, k = 1, п = u21.
Для трансмиссий, понижающих частоту вращения (редукторов) k > 1, т.е. M2 > M1, опорный момент M3 положителен (совпадает по направлению с M1). При k = 1 и M2 = M1 трансмиссия трансформирует частоту и момент, т.е. превращается в муфту (u21 = п).
Для ускоряющих трансмиссий (мультипликаторов) k < 1, u21 > 1, M2 > M1, опорный момент отрицателен.
Для трансмиссии — трансформатора, предназначенного для преобразования момента, внешняя опора обязательна.
Трансмиссия является промежуточным звеном между двигателями и исполнительным механизмом и предназначена для приспособления характеристики двигателя к характеристике, требуемой этим органом. При этом следует различать характер изменения нагрузки и частот вращения на исполнительном органе в период длительной работы и периоды пусков и остановок, т.е. режим переменно-кратковременных нагрузок. В зависимости от свойств двигателя соответствующим образом компонуют и трансмиссию.
В буровой установке исполнительные органы работают в разных режимах, как длительных, так и пусковых. Например, для ротора и насосов, пускаемых сравнительно редко, разгонные характеристики не играют большой роли, как для лебедок, работающих при спускоподъемных операциях в очень напряженном режиме повторно-кратковременных нагрузок. Длительно действующие нагрузки в этих исполнительных органах изменяются в процессе работы неодинаково, поэтому для обеспечения наибольшей эффективности процесса каждого исполнительного органа трансмиссия по возможности должна полнее удовлетворять этим требованиям, и необходимо рассматривать как пусковые и тормозные свойства, так и свойства их при длительно действующих режимах.
Механическими называют трансмиссии, передающие движение и энергию от двигателей к исполнительным органам буровой установки и состоящие из валов, различных передач (зубчатых, гибкой связью, муфт и т.д.), не регулирующие автоматически ни момента, ни частот вращения при изменении нагрузки на исполнительном органе установки.
Кинематическую настройку трансмиссий выполняет только оператор. Механические трансмиссии могут обеспечить любой диапазон трансформирования и регулирования частот вращения и крутящих моментов.
Механические трансмиссии можно подразделить на простые и сложные. Простые трансмиссии не регулируют частоты и моменты, а осуществляют только их постоянное трансформирование (например, трансмиссия бурового насоса, схема которой дана на рис. 23.7, а). Сложные трансмиссии обеспечивают трансформацию и регулирование частот и моментов под воздействием оператора. В сложных механических трансмиссиях буровых установок частоты вращения и моменты регулируют только ступенчато при помощи коробок передач (например, трансмиссия привода буровой лебедки, схема которой показана на рис. 23.7, б). Характеристика силового привода на его конечном звене — выходном валу — зависит о сочетания его собственной характеристики с жесткой характеристикой трансмиссии.
Пусковые характеристики механической трансмиссии зависят только от свойств двигателя и муфт сцепления, используемых при кратковременных режимах пусков и остановок.
В отличие от транспортных машин коробки передач в буровых установках нельзя использовать для разгона, так как силы инерции поднимаемой бурильной колонны значительно меньше сил сопротивления, а время переключения коробки передач для изменения скоростей подъема крюка относительно велико.
Если двигатель обладает способностью осуществлять пуск трансмиссии под нагрузкой (паровые машины и электродвигатели постоянного и переменного тока с фазным ротором), то в трансмиссии для соединения валов можно применять жесткие муфты сцепления (зубчатые, кулачковые и др.), которые включают муфты до начала движения; разгон трансмиссии происходит под нагрузкой при включенной муфте. При этом двигатель преодолевает сопротивление от статического (рабочего) сопротивления, инерционных сил трансмиссии и собственных вращающихся частей, т.е. уравнение механического равновесия при переходных процессах имеет вид
Мд - Мст - Ми.д - Мит = 0, (23.3)
где Мд и Мст — вращающий момент двигателя и статического сопротивления; Ми.д и Ми.т — моменты инерционных сил вращающихся частей двигателя и трансмиссии относительно осей вращения.
Инерционные моменты, Н-м,
,2
Миi = J0l-^T, (23.4)
dt
здесь J0i — момент инерции вращающихся частей двигателя и трансмиссии, приведенной к оси двигателя, Н-м-с2; фi — углы поворота валов, рад; t — время переходного процесса, с.
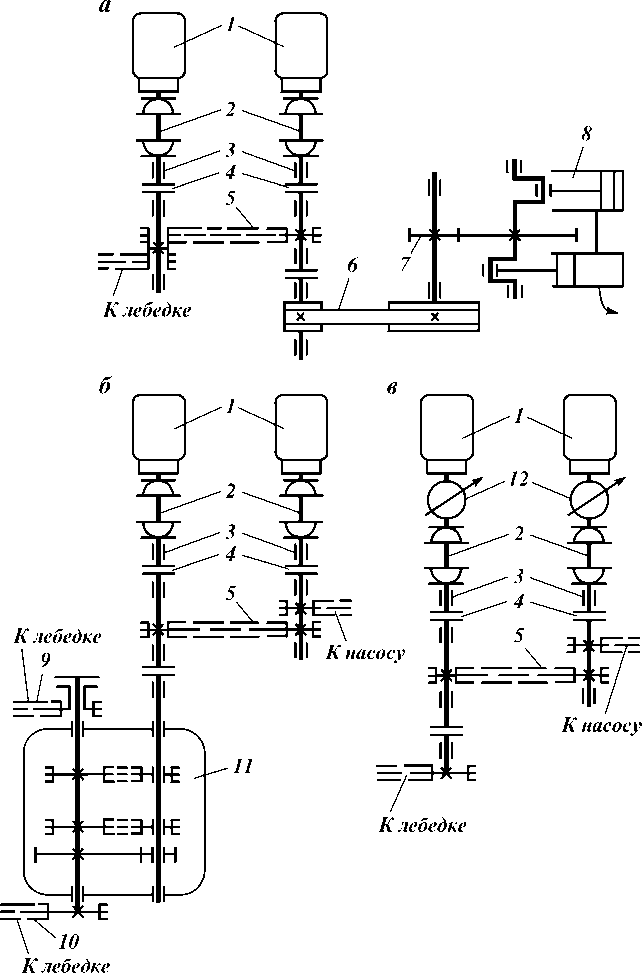
Рис. 23.7. Схемы трансмиссий силовых приводов:
а - нерегулируемой механической, блокирующей два двигателя привода насоса; б - регулируемой механической с коробкой передач привода лебедки; в - полуавтоматической привода лебедки и насосов; 1 - двигатель; 2 - карданный вал; 3 - опора; 4 - фрикционная муфта; 5 - блокирующая цепная передача; 6 - клиноременная передача привода насоса; 7 - зубчатая передача; 8 - насос; 9, 10 - «быстрая» и «тихая» цепные передачи привода лебедки; 11 - коробка передач; 12 - автоматическое регулирующее устройство
Так как моменты инерции разгоняемых масс двигателя весьма значительны, то потери энергии при пусках могут сильно возрастать. Рациональное распределение инерционных масс между валами двигателя и трансмиссии является важной задачей, особенно для подъемного механизма буровой установки, где пуски и остановки весьма часты.
Для уменьшения вращающихся моментов двигателя при пусках используют разные средства: изменяют пусковую характеристику двигателя или устанавливают между двигателем и трансмиссией фрикционные, электродинамические или гидравлические муфты. В механических трансмиссиях применяют только фрикционные муфты.
В процессе пуска электродвигателя с короткозамкнутым ротором, соединенным с трансмиссией жесткой муфтой, время разгона очень небольшое; при этом возникают большие инерционные моменты, что требует резкого увеличения вращающего момента двигателя и ведет к увеличению силы пускового тока в 4 — 5 раз и более. Для прямого пуска под нагрузкой короткозамкнутые двигатели больших мощностей в буровых установках не применяют.
При пуске трансмиссии от двигателя (асинхронного или синхронного) с постоянной частотой вращения через фрикционную муфту время разгона увеличивается, а требуемый при пуске вращающий момент двигателя меньше, чем в первом случае; возникающие инерционные моменты в трансмиссии могут частично или полностью преодолеваться за счет маховых моментов ротора двигателя, почти не увеличивая его вращающего момента. Однако при жесткой характеристике двигателя и больших вращающихся массах повышаются инерционные нагрузки на муфту, вследствие чего в ней увеличивается работа трения при скольжении во время включения. Для снижения влияния инерционных нагрузок на вращающий момент двигателя при его жестком соединении с трансмиссией применяют асинхронные двигатели с ротором, имеющим фазовую обмотку. В этом случае пуск происходит постепенно благодаря включению в обмотку ротора сопротивлений. При этом инерционные моменты ротора двигателя и трансмиссии, а также статический момент преодолеваются вращающим моментом самого двигателя; время разгона больше, чем в первых двух случаях.
Недостатком системы с фазным ротором является то, что двигатели требуют довольно сложной пусковой аппаратуры, причем улучшаются характеристики только процесса пуска. При рабочем режиме характеристика остается жесткой. При пуске трансмиссии от двигателя с гибкой характеристикой, например ДВС с фрикционной муфтой, угловая скорость двигателя может снижаться, а угловая скорость трансмиссии — плавно увеличиваться. В этот период происходит проскальзывание муфты сцепления. Разгон осуществляется частично за счет вращающего момента двигателя и сил инерции его вращающихся частей.
В определенный момент скольжение муфты прекращается, и дальнейший разгон происходит плавно благодаря увеличению топливной энергии, подводимой к двигателю по команде оператора; трансмиссия не подвергается большим динамическим нагрузкам.
Совместная работа двигателей с механической трансмиссией может обеспечить постоянную трансформацию частот вращения и крутящего момента либо при наличии коробки передач их ступенчатое изменение. На каждой из степеней частоту можно регулировать только за счет диапазона регулирования и коэффициента перегрузки самого двигателя.
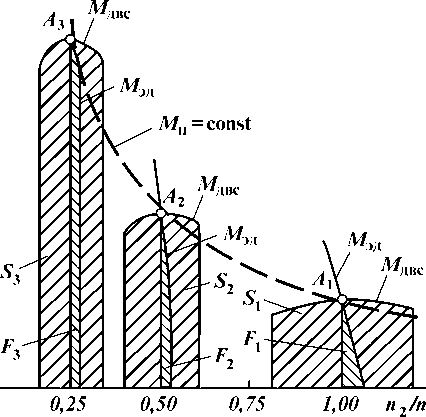
Рис. 23.8. График совместной работы механической трансмиссии с коробкой передач и двигателями разных типов (М2/М1 и П2/П1 — относительные крутящий момент и частота вращения)
На рис. 23.8 приведены график совместной работы трехступенчатой коробки передач с ДВС при диапазоне регулирования R =1,5, а также кривые крутящего момента Мдвс и Мэд — асинхронного электродвигателя, обладающего практически постоянной частотой вращения. Точки А1, А2 и А3 характеризуют номинальный момент на разных передачах коробки пере
Мгщ
1
4
3
2
о
дач. Заштрихованные площади S1, S2 и S3 соответствуют диапазонам изменения нагрузок и частот вращения при ДВС, а площади F1, F2 и F3 — при асинхронном электродвигателе. Кривая Мп = const — идеальная кривая при полном использовании мощности. Как видно на этом графике, ДВС обеспечивает некоторую гибкость силового привода, в то время как асинхронные электродвигатели такими свойствами не обладают, и располагаемая мощность не может полностью использоваться, например, в приводе лебедок, где при подъеме бурильных колонн происходит последовательное уменьшение нагрузки на крюке по мере извлечения колонны из скважины и уменьшения числа поднимаемых свечей.
Полуавтоматической называют механическую трансмиссию, снабженную устройством для автоматического (т.е. без участия оператора) изменения в определенных пределах характеристики силового привода. Схема силового привода такого типа с двумя механически сблокированными двигателями приведена на рис. 23.7, в; между двигателями и фрикционной муфтой установлены устройства 12, автоматически преобразующие его характеристику.
В буровых установках применяют два типа полуавтоматических трансмиссий: 1) трансмиссии, изменяющие только пусковые и кратковременные характеристики; 2) трансмиссии, способные длительно преобразовывать характеристику и обеспечивать гибкость привода при высоком
КПД.
В первом случае в трансмиссию между двигателями и передачей встраивают автоматически действующую гидравлическую или электродинамическую муфту. При пуске на малых частотах вращения двигателя эти муфты передают незначительный крутящий момент, обеспечивая при этом плавное включение и разгон трансмиссии. Такие муфты также защищают двигатели от перегрузок и внезапных остановок, так как при резком возрастании момента сопротивления на трансмиссии муфта не передает момента вращения, превышающего расчетный. Если на исполнительном механизме перегрузка действует длительно, то двигатели должны быть отключены с помощью фрикционных муфт 4 (см. рис. 23.7, в); в противном случае происходит перегрев муфты, так как вся энергия двигателей превращается в теплоту (п = 0), потому что их КПД обратно пропорционален скольжению.
Во втором случае для преобразования характеристик при длительно действующих режимах в качестве регулирующих устройств (см. рис. 23.7,
в) применяют гидродинамические преобразователи момента, которые встраивают в трансмиссию между двигателем 1 и фрикционной муфтой 4, либо электромашинные передачи. Эти устройства обладают достаточно высоким КПД (п = 0,7^0,9) при широком диапазоне регулирования.
ПОЛУАВТОМАТИЧЕСКИЕ ТРАНСМИССИИ
С ГИДРАВЛИЧЕСКИМИ ПЕРЕДАЧАМИ
Совместная работа двигателя с турбомуфтой. Турбомуфта представляет собой агрегат, состоящий из центробежного насоса, колесо которого соединено с валом двигателя, и турбины, соединенной с вторичным (выходным) валом. Момент M2, развиваемый на вторичном валу, пропорционален квадрату угловой скорости ю1 двигателя, поэтому можно считать, что характеристика турбомуфты состоит из двух периодов, соответствующих разгонному и рабочему режимам.
При рабочем режиме трансмиссии угловая скорость двигателя ю2 и момент Мн достигают своих номинальных значений. При этом скольжение электродвигателей обычно составляет 2-4 % (при холостом ходе около 0,5 %). Турбомуфта не передает на вал момент, превышающий расчетный. Значение этого момента зависит также от наполнения муфты жидкостью: при снижении наполнения передаваемый муфтой момент при одинаковом скольжении уменьшается.
Существуют разнообразные конструкции турбомуфт, допускающих регулирование наполнения, однако в буровых установках эти конструкции широкого распространения не получили.
Совместная работа двигателя с турботрансформатором. Турботрансформатор представляет собой турбомашину, которая состоит из центробежного насоса, соединенного с первичным валом двигателя, и направляющего аппарата; последний изменяет направление потока жидкости, выходящего из насоса и турбины. Колесо турбины соединено с выходным (вторичным) валом турботрансформатора. Турботрансформатор является своеобразной коробкой передач с бесконечным числом передач и переменным КПД, так как потери в жидкости, циркулирующей в турботрансформаторе, возрастают с увеличением коэффициента трансформации частоты вращения. Как для любой турбомашины, мощность на ведущем валу турботрансформатора, кВт,
N д = N1 = Vn! D5 (23.5)
и момент, Н-м,
Мд = М1 = V^ D5, (23.6)
где Х1 - постоянный коэффициент, характеризующий турботрансформатор; р — плотность жидкости, кг/м3; пд — частота вращения первичного вала, мин — 1; D — диаметр колеса центробежного насоса, м.
Мощность на вторичном (выходном) валу турботрансформатора, кВт,
N т = N^, (23.7)
здесь пт — КПД турботрансформатора, который зависит от конструктивного исполнения и коэффициента трансформации u21 (передаточного отношения).
Крутящий момент на вторичном валу, Н-м,
Мт = Ku2lMv (23.8)
где Х2 — постоянный коэффициент, зависящий от конструкции турботрансформатора.
Двигатель с турботрансформатором представляет собой приводной агрегат с характеристикой, отличающейся от характеристик как двигателя, так и турботрансформатора. Двигатель может обладать частотой вращения вала либо строго постоянной (например, электродвигатель синхронный), либо изменяющейся в некоторых пределах (например, ДВС). При правильном подборе двигателя и турботрансформатора характеристика агрегата более полно удовлетворяет требованиям исполнительных органов буровой установки.
Если пд = const, то в общем случае при изменении частоты вращения пт выходного вала крутящий момент на валу двигателя может несколько изменяться. Это свойство трансформатора называется прозрачностью. Степень прозрачности при пд = const
П = МД/МД,
д Д'
где МД' — момент на валу двигателя при пт = 0; МД — момент на валу двигателя при коэффициенте трансформации u21 = 1, т.е. при пд = пт.
В буровых установках применяют турботрансформаторы со степенью прозрачности П = 1,2^1,7.
Для расширения зоны регулирования при высоких КПД можно использовать комплексные турботрансформаторы, объединяющие в себе турботрансформатор и турбомуфту и имеющие два и более направляющих аппарата, или устанавливать после турботрансформатора коробки передач.
Совместная работа трансмиссии двигателя, турботрансформатора и коробки передач. Для исполнительных органов, требующих более широкого диапазона, чем это может обеспечить двигатель с турботрансформатором, в трансмиссии применяют коробку передач (например, в приводах буровых лебедок). В этом случае коробка передач увеличивает рабочий диапазон пропорционально числу передач при высоких значениях КПД. Общий диапазон регулирования такой трансмиссии
R = ДдДттДк.п,
где R, Rtt и RKM — диапазон регулирования двигателя, турботрансформатора и коробки передач.
В таких трансмиссиях применение комплексных трансформаторов может быть излишним, так как работа на передачах I, II и III значительно увеличивает общий диапазон регулирования при высоких КПД.
ПОЛУАВТОМАТИЧЕСКИЕ ЭЛЕКТРОМАШИННЫЕ ПРИВОДЫ ПОСТОЯННОГО ТОКА
Электромашинный привод постоянного тока представляет собой сложный агрегат, в котором работают совместно ДВС, электрогенератор и двигатель постоянного тока. В буровых установках трансмиссии с электромашинными передачами весьма разнообразны, и с их помощью могут быть получены различные характеристики.
Согласно схеме электромашинной передачи с комбинированным возбуждением и управлением, изображенной на рис. 23.9, а, ДВС 1 приводит во вращение генератор постоянного тока 2, который питает током двигатель 10. Генератор 2 имеет последовательную 3 и параллельную 4 обмотки возбуждения и обмотку 6 для возбуждения напряжения в обмотке 7 двигателя 10, которое регулируется реостатом 8. Контакторы 5 служат для отключения обмоток. Характеристики регулируются в определенных пределах автоматически при постоянной частоте вращения ДВС. При необходимости более глубокое регулирование осуществляют изменением количества топлива, подаваемого в ДВС пневматическим регулятором 9, и изменением возбуждения генератора реостатом 8. Подобное полуавтоматическое регулирование одновременным воздействием и на первичный и на вторичный двигатели позволяет получить характеристику с изменением параметров в более широком диапазоне.
На рис. 23.9, б приведена характеристика электродвигателя постоянного тока, получаемая при регулировании электрических параметров тока возбуждения (напряжения и силы) и частоты вращения первичного вала ДВС. Кривая 2 крутящего момента Мд не совпадает с идеальной кривой 1 при N = const, так как у двигателя постоянного тока, как видно на графике (кривая 3), мощность N переменная.
б
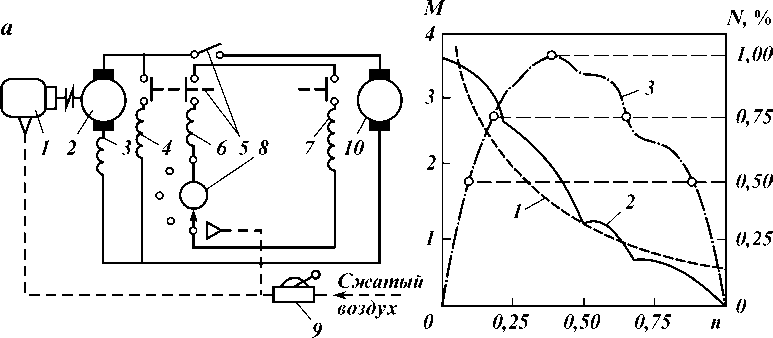
Рис. 23.9. Электромашпнная трасмпсспя постоянного тока:
а — схема с одновременным регулированием частот вращения ДВС и генератора, а также напряжения возбуждения электродвигателя; б — характеристика электродвигателя постоянного тока электромашинной трансмиссии (М, N и n — крутящий момент, мощность и частота вращения вала двигателя в относительных величинах)
При необходимости расширения диапазона регулирования в трансмиссиях применяют коробки передач; тогда кривые крутящего момента и мощности изменяют аналогично тому, как это происходит в трансмиссиях с турботрансформаторами.
Совместная параллельная работа двигателей. Для обеспечения надежности, увеличения маневренности и повышения коэффициента использования установленной мощности в буровых установках часто применяют групповые или двухдвигательные одиночные приводы.
Электродвигатели (не более четырех) блокируют параллельно или последовательно для передачи мощности на один вал в приводах лебедок или насосов. ДВС блокируют только параллельно (от двух до четырех) в общем приводе всех агрегатов (лебедка, насосы и ротор). Для группового привода необходимо, чтобы каждый двигатель отдавал свою полную мощность. Это условие должно выполняться в процессе работ при различных частотах вращения трансмиссии; однако это условие трудно выполнить, так как внешние характеристики двигателей и устройств, регулирующих их работу, всегда отличаются одна от другой.
Так как привод в процессе бурения работает с разными частотами вращения, то всегда при жестком блокировании суммарная мощность нескольких двигателей не равна сумме их номинальных мощностей.
В один привод не блокируют более четырех ДВС в связи с понижением суммарной мощности.
Если в трансмиссии применяют устройства, допускающие скольжение (электрические муфты, турбопередачи и др.), то частоты вращения каждого двигателя различаются, и суммарная мощность привода в этом случае N = n2N^, где п — КПД устройства, допускающего скольжение.
В случае блокирования жесткой передачи нескольких асинхронных двигателей для передачи их мощности на общий вал происходит их неравномерная нагрузка при одинаковой частоте вращения. Блокирование жесткой передачи синхронных двигателей в буровых установках не применяют, так как один из двигателей всегда будет перегружаться.
Устойчивая работа двигателей трансмиссии обеспечивается в том случае, если на части кривой его характеристики момент двигателя Мд равен моменту сопротивления Мс. Параметры устойчивого режима располагаются в точке пересечения характеристик Мд и Мс.
23.4. МУФТЫ
Муфты предназначены для передачи вращения с одного вала на другой или с вала на свободно сидящую на нем деталь (например, цепную звездочку, зубчатое колесо). Муфты не изменяют значение и направление передаваемого вращающего момента. Ее выбирают по передаваемому вращающему моменту и диаметру соединяемых валов. В буровых машинах и механизмах используют муфты различных конструкций и видов, отвечающие определенным монтажным и эксплуатационным требованиям.
Муфты делят на механические, гидравлические и электромагнитные. Механические муфты по назначению подразделяют на постоянные и сцепные. Постоянные муфты не допускают разъединения валов в процессе работы машины. Для разъединения валов, соединенных постоянными муфтами, и требуется их разборка, которую производят при ремонте и демонта-
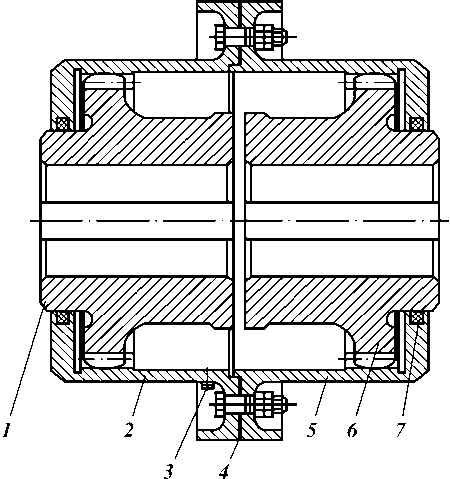
Рис. 23.10. Зубчатая муфта
же. Сцепные муфты служат для соединения и разъединения валов на ходу или при кратковременных остановках.
Постоянные муфты. Для
постоянного соединения валов применяют неподвижные (глухие) и подвижные муфты. Наиболее просты по конструкции глухие муфты: втулочные со штифтами и со шпонками, фланцевые (по-перечно-сверт-ные) и про-дольно-свертные. Глухие муфты можно использовать при строгой соосности валов. В буровых машинах трудно обеспечить необходимую для установки глухих муфт соосность валов, поэтому в машинах и агрегатах бурового комплекса для постоянных соединений преимущественно используют подвижные муфты, допускающие взаимное смещение валов за счет подвижных элементов муфты. К подвижным муфтам относят жесткие компенсирующие, шарнирные и упругие. Все три типа применяют в буровых машинах.
Из жестких компенсирующих муфт наиболее распространены зубчатые, способные компенсировать незначительные осевые, радиальные и угловые смещения соединяемых валов. На рис. 23.10 показана зубчатая муфта, соединяющая тихоходный вал редуктора с трансмиссионным валом регулятора подачи долота. Муфта состоит из обойм 2 и 5 с внутренними зубьями, находящимися в зацеплении с наружными зубьями втулок 1 и 6. Для снижения потерь на трение и увеличения долговечности зубчатое зацепление работает в масляной ванне, герметизированной прокладкой 4 и войлочными кольцами 7. Отверстие для масла закрывают пробкой 3. Аналогичную муфту применяют во вспомогательных лебедках.
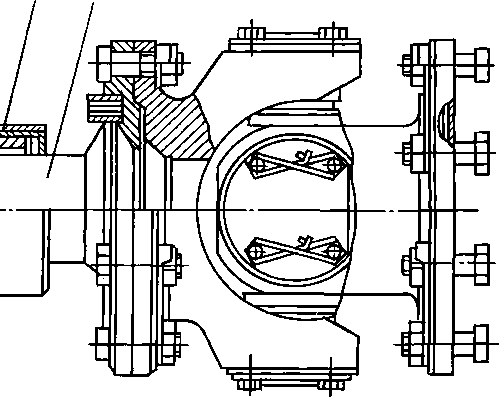
Шарнирные муфты служат для соединения валов, оси которых расположены под большим углом друг к другу, причем в процессе работы угол наклона может изменяться. Шарнирная муфта состоит из двух валов и шарнирно соединенной с ними крестовины. Недостаток шарнирной муфты — неравномерность вращения ведомого вала при равномерном вращении ведущего, если валы установлены несоосно. Для устранения этого недостатка применяют сдвоенные шарнирные муфты с промежуточным валом, образующие в этой комбинации карданную передачу, которую принято называть карданным валом. Карданные валы используют в приводе буровых установок для передачи вращающего момента от гидротрансформатора к суммирующему редуктору, буровым насосам и ротору в тех случаях, когда они располагаются на разных отметках по высоте. Для равномерного вращения ведомого звена необходимо обеспечить параллельность валов, соединяемых карданным валом. В буровых машинах применяют шесть типоразмеров карданных валов:
| Номер вала...................................................................... | I | II | III | IV | V | VI |
| Тип вала (Л — легкий, Т — тяжелый)....................... | Л |
Т | Т | Т |
Т | Т |
|
Число шарниров............................................................. | 2 | 2 | 2 | 2 | 2 | 1 |
| Максимальная частота вращения, мин 1.................. |
1600 | 1140 | 1140 |
1140 | 1140 | 750 |
| Максимальный передаваемый вращающий момент, кН-м................................................................................... | 3,7 | 14,0 |
14,0 | 14,0 | 5,1 |
14,0 |
| Длина, мм......................................................................... | 720 | 1055 |
890 | 1195 | 812 |
2225,5 |
| Ширина, мм..................................................................... | 230 | 300 |
300 | 300 | 300 |
300 |
| Масса, кг.......................................................................... | 50 | 182 |
165 | 190 | 140 |
261,8 |
Устройство карданного вала показано на рис. 23.11.
Упругие подвижные муфты характеризуются наличием упругого элемента, в результате деформации которого происходит взаимное перемещение деталей муфты, необходимое для компенсации смещения осей соединяемых валов. Наряду с этим упругие муфты смягчают толчки и удары и служат средством защиты от резонансных крутильных колебаний, возникающих вследствие неравномерного вращения. Упругие муфты изготовляют с металлическими и неметаллическими, преимущественно резиновыми, упругими элементами. В буровых машинах и агрегатах применяют муфты с резиновыми упругими элементами благодаря сравнительной простоте конструкции, низкой стоимости, отсутствию особых требований по уходу, высоким компенсационным свойствам и хорошей демпфирующей способности. При работе с электродвигателями важное значение приобретает электроизолирующая способность муфт с резиновыми упругими элементами.
Для соединения тяжело нагруженных валов буровых машин и агрегатов, а также для соединения вала электродвигателя с трансмиссионным валом бурового насоса и промежуточным валом лебедки используют упругие (эластичные) муфты, конструкция которых показана на рис. 23.12. Полу-муфту 1 с конусной расточкой устанавливают на консоль вала и закрепляют гайкой 2, предохраняемой от самоотвинчивания специальной шайбой. Вторая полумуфта состоит из ступицы 8 и стакана 6, соединяющихся болтами 7. Ступица имеет цилиндрическую расточку и крепится на консоли вала шпонкой. В утолщенных ободах стакана 6 и диска ступицы 3 имеются отверстия для резиновых валиков 4, которые предохраняются от выпадания пружинным кольцом 5, установленным в кольцевом пазу обода стакана.
Упругая муфта, изображенная на рис. 23.13, служит для соединения коленчатого вала дизеля с валом редуктора. Диск 2 с зубчатым венцом 3 для запуска дизеля стартером устанавливается на шлицы вала дизеля и центрируется на нем бронзовыми конусами 1 и 7. Конусы затягиваются с помощью разрезной пробки 8, ввинченной в вал дизеля и надежно закрепленной конической пробкой 13, гайкой 11 и шайбой 12. Ведомый стакан 6 закреплен на коническом конце быстроходного вала 9 понизительного редуктора и застопорен гайкой 10. В ведущем и ведомом дисках установлены по девять пальцев 5 и 14, которые попарно соединены пластинами 4 из прорезиненной ткани.
Высокими эксплуатационными качествами обладают муфты, в которых в качестве упругого элемента использована резиновая звездочка.
Сцепные муфты используют для частых пусков и остановок, при необходимости изменения режима работы и реверсировании. Вращающий момент передается зацеплением (сцепные кулачковые и зубчатые муфты) либо силами трения (фрикционные сцепные муфты).
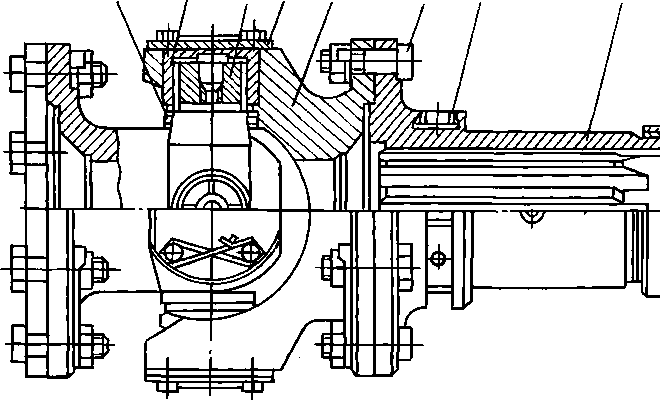
Рис. 23.11. Карданный вал III (тяжелый):
1 — уплотнение; 2 — обойма с игольчатыми подшипниками; 3 — крестовина; 4 муфта; 9 — гайка; 10 — шлицевой вал
— крышка; 5 — вилка; 6 — болт; 7 — балансир; 8 — шлицевая
Рис. 23.12. Упругая (эластичная) муфта
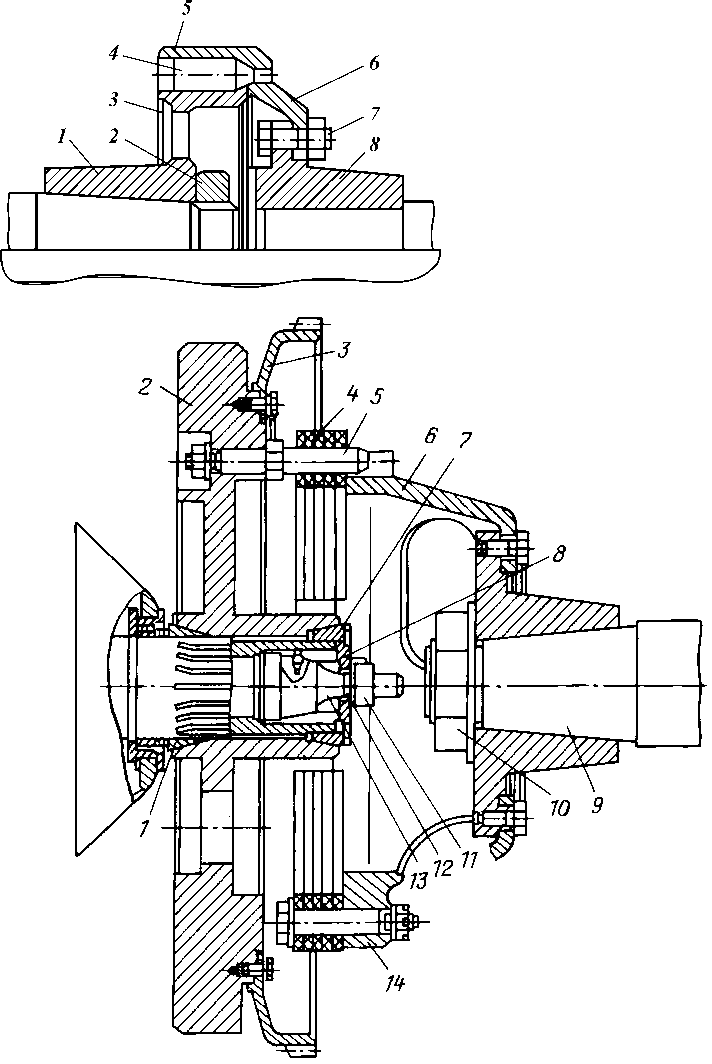
Рис. 23.13. Упругая муфта дизеля
Сцепные кулачковые и зубчатые муфты состоят из двух полумуфт, она из которых крепится на ведущем валу, а другая перемещается на шпонках или шлицах ведомого вала с помощью вилки и сухарей.
В тяжело нагруженных реверсируемых соединениях применяют кулачковые муфты с прямыми кулачками, число которых выбирают в зависимости от передаваемого вращающего момента. Подвижную муфту обычно располагают на ведомом валу, что позволяет уменьшить износ деталей управления муфтой. Для нереверсивных соединений используют муфты с тремя или шестью косыми кулачками. Кулачковые муфты очень чувствительны к перекосам и несоосности валов, и их применяют в основном для соединения свободно вращающихся цепных звездочек с валом в коробках перемены передач буровой лебедки и цепных редукторах. Реже, например для соединения регулятора подачи долота и гидродинамического тормоза с лебедкой, используют кулачковые муфты, у которых полумуфты располагаются на концах соединяемых валов.
Зубчатая сцепная муфта состоит из двух полумуфт, имеющих на цилиндрических поверхностях наружные и внутренние эвольвентные либо полукруглые зубья. Для облегчения включения торцы зубьев скругляют.
Кулачковые и зубчатые муфты по сравнению с фрикционными проще по конструкции и имеют значительно меньшие габариты и массу. Их основной недостаток — невозможность включения на быстром ходу. Во избежание повреждения кулачков и зубьев включение муфты на ходу допускается без нагрузки и при небольшой разности угловых скоростей. Для включения муфты в состоянии покоя обычно осуществляют холостое проворачивание ведущей полумуфты до совмещения выступов и впадины муфты. Возможность включения муфты без холостого проворота зависит от числа кулачков и их профиля. Материал для изготовления кулачковых и зубчатых муфт должен иметь высокую твердость, поэтому для них обычно используют стали с закалкой до твердости HRC 45 — 60. Муфты крупных размеров изготовляют из сталей марок 40Х, 30ХН, 35ХГС и др.
Вращающий момент сцепных кулачковых и зубчатых муфт ограничивается контактным давлением. Для кулачковых муфт предельный вращающий момент, Н-м,
Мвр = 0,5dozF[p],
где d0 — средний диаметр муфты по кулачкам, м; z — число кулачков; F — площадь проекции опорной поверхности кулачка на диаметральную плоскость, м2; [p] — допускаемое контактное давление, Па.
Для стальных термически обработанных (цементация и закалка) кулачков контактное давление при включении муфты на ходу не должно превышать 70 МПа.
Фрикционные муфты используют в силовых передачах лебедки, насосов, ротора и других агрегатов бурового комплекса совместно с постоянными кулачковыми и зубчатыми. Они служат для дистанционного включения и отключения двигателей и основных агрегатов бурового комплекса, оперативного переключения скоростей лебедки при спускоподъемных операциях. Фрикционные муфты передают вращающий момент посредством сил трения между пластинами или дисками ведущей и ведомой полумуфт. В отличие от кулачковых и зубчатых фрикционные муфты позволяют осуществить плавное сцепление валов при любой частоте их вращения.
Особенность фрикционных муфт заключается в том, что они обладают ограниченным запасом сцепления. При чрезмерных нагрузках муфта проскальзывает и предохраняет узлы и детали машин от поломок. В зависимо-

сти от формы сцепляющихся элементов различают цилиндрические и дисковые фрикционные муфты. В силовых передачах буровых комплексов наиболее распространены цилиндрические фрикционные муфты, обладающие по сравнению с дисковыми существенными преимуществами — простотой конструкции, низкой стоимостью, удобством монтажа и ремонта в промысловых условиях, пониженной чувствительностью к несоосности соединяемых валов. По конструктивным признакам цилиндрические фрик-
ристика (в) 0 0,2 0,4 0,6 0,8 tl/n |,р
ционные муфты подразделяют на шинно-пневматические, пневмокамерные и многокамерные.
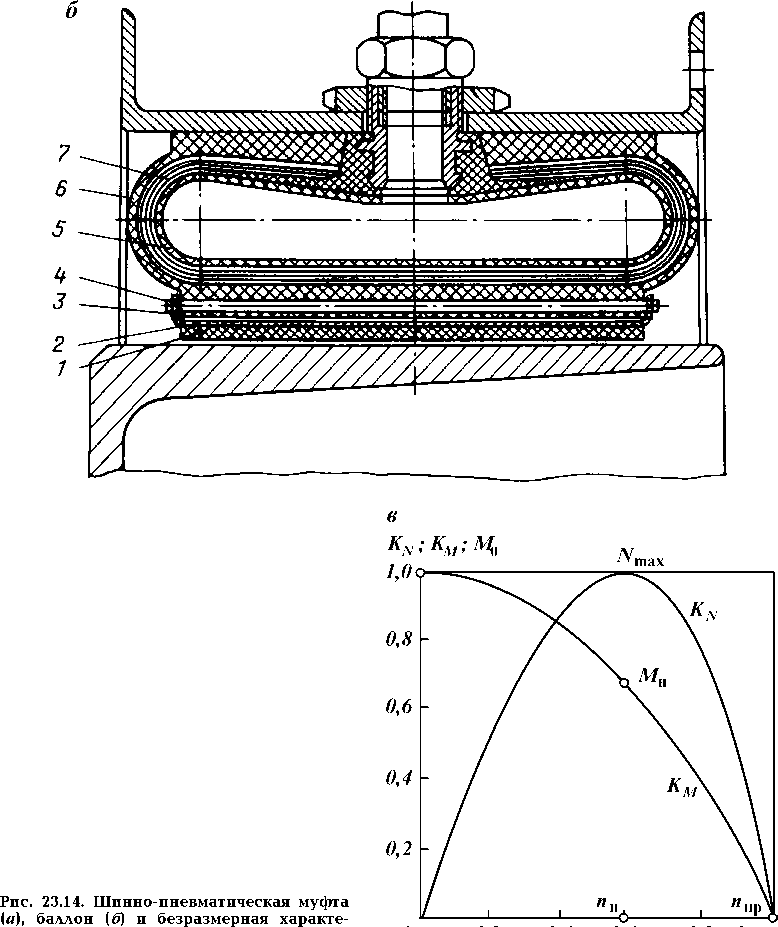
Шинно-пневматическая муфта (рис. 23.14, а) состоит из концентрично расположенных обода 4 и шкива 2, между которыми помещают резинокордный баллон 3 с фрикционными накладками. Сжатый воздух через ниппель 5 поступает в баллон и прижимает накладки 1 к поверхности шкива. В рассматриваемой конструкции баллон прикреплен к стальному ободу и под давлением воздуха обжимает шкив. Такую муфту называют обжимной. В разжимных муфтах баллон прикреплен к внутренней полумуфте, выполняющей роль обода. В этом случае фрикционные накладки располагаются на внешней поверхности баллона и прижимаются к наружной полумуфте, выполняющей роль шкива.
Центробежные силы, возникающие при вращении муфты, по-разному влияют на работу обжимных и разжимных муфт. В разжимной муфте центробежные силы прижимают накладки к шкиву, способствуя повышению момента сцепления с увеличением частоты вращения муфты. В обжимной муфте центробежные силы отжимают накладки от шкива и уменьшают момент сцепления муфты. При отключении обжимных муфт центробежные силы оказывают полезное действие, способствуя их быстрому расцеплению. В разжимных муфтах центробежные силы препятствуют разъединению валов, поэтому такие муфты применяют в тихоходных передачах при скоростях скольжения накладок относительно шкива муфты не более 5 м/с. В силовых передачах и других агрегатах бурового комплекса используют только обжимные шинно-пневматические муфты.
Схему, установки муфт выбирают с учетом возможности использования центробежной силы в качестве фактора, способствующего их быстрому отключению. Для этого полумуфту с баллоном необходимо устанавливать на ведущем валу. Иногда это невозможно вследствие сложности подвода воздуха в муфту. В этих случаях полумуфту с баллоном приходится устанавливать на ведомом валу.
Баллон (рис. 23.14, б) состоит из кольцевой резиновой камеры 5, наружного резинового протектора 6, между которыми находится обрезинен-ный кордный каркас 7. В баллоне имеются один или два ниппеля для подачи воздуха в камеру. Ниппели привулканизированы к баллону. Баллон прикрепляют к ободу горячей вулканизацией либо болтами.
Фрикционные накладки 1 приклеены к стальным колодкам 2, которые с помощью металлических валиков 4 прикреплены к протектору баллона. Для тепловой защиты баллона, нагреваемого в результате скольжения, между протектором и колодкой помещена паронитовая прокладка 3. Валики попарно шплинтуются стальной проволокой. Шкивы и обод муфты изготовляют из горячекатаной стали марки 60Г (ГОСТ 1050 — 74) либо из углеродистой стали марок 40, 50 и подвергают закалке (50 — 55 HRC) и шлифованию. Для удобства монтажа и ремонта шкив и обод имеют разъемные соединения со ступицами полумуфт. Наладки шинно-пневматических муфт изготовляют из ретинакса и других фрикционных материалов, обычно используемых для ленточных тормозов буровой лебедки.
Момент сцепления обжимной шинно-пневматической муфты
М = (Р — P^D/2, (23.9)
где P — радиальное усилие, создаваемое давлением воздуха в баллоне; Рцб — центробежная сила, отжимающая фрикционные накладки; ц — коэффициент трения; D — наружный диаметр шкива муфты (диаметр поверхности трения).
Радиальное усилие, создаваемое давлением воздуха в баллоне муфты
Р = (Р — P0)F,
где Р — давление в баллоне; р0 — давление, необходимое для выбора зазора между накладками и шкивом муфты (р0 = 0,03^0,05 МПа); F — площадь поверхности кольцевой полости баллона, передающей давление на шкив.
Центробежная сила, отжимающая фрикционные накладки,
Рцб = mV'/R и 0,005mDn2,
где m — масса фрикционных накладок и других частей баллона, отжимаемых центробежными силами; v — окружная скорость центра тяжести отжимаемой части; R = 0,5D — расстояние от оси вращения до центра тяжести отжимаемой части баллона; n — частота вращения муфты, мин-1. Подставляя значения Р и Рцб в формулу (23.9), получают
М = [(p - p0) F — 0,005mDn2]|xD/2. (23.10)
Из формулы (23.10) следует, что момент сцепления шиннопневматической муфты достигает наибольшего значения при тормозном режиме (n = 0):
М0 = (p - p0) F|xD/2.
С увеличением частоты вращения момент сцепления обжимных шинно-пневматических муфт снижается и достигает нуля при условии
(p — p0) F — 0,005mDn2 = 0.
Частоту вращения, при которой момент сцепления муфты равен нулю, называют предельной частотой вращения муфты:
Ппр =V(p - p0)F /(0,005mD).
Влияние частоты вращения на момент сцепления муфты учитывается коэффициентом момента
Км = Мп/М0,
где Мп — момент сцепления муфты при частоте вращения n.
На рис. 23.14, в приведена безразмерная характеристика шиннопневматических муфт. Мощность, передаваемая муфтой, равна нулю при тормозном режиме (n = 0) и при вращении с предельной частотой (n = ппр). Номинальные значения частоты вращения и момента сцепления муфт, соответствующие режиму наибольшей передаваемой мощности,
nH ~ 0,6ппр; Мн ~ 0,65М0.
Влияние частоты вращения муфты на передаваемую мощность учитывается коэффициентом мощности
KN = Nn/Nmax,
где Nn — мощность, передаваемая муфтой при частоте вращения n; Nmax — максимальная мощность, передаваемая муфтой при номинальной частоте вращения.
Кривые момента сцепления и мощности в соответствующем масштабе выражают изменение коэффициентов момента и мощности (см. рис. 23.14,
в). Шинно-пневматические обжимные муфты следует выбирать так, чтобы наибольшая частота вращения под нагрузкой не превышала 0,7ппр. При дальнейшем увеличении частоты вращения резко снижаются моменты сцепления и мощности, вызывающие неустойчивость в работе муфты. Муфты выбирают исходя из следующих расчетных условий:
S =
> [Sили S =
NmaxKn
> [S];
Мвр N
где S — запас сцепления; Мвр — момент вращения от рабочей нагрузки; [S] — допускаемый запас сцепления; N — мощность, передаваемая муфтой.
Допускаемый запас сцепления назначают в зависимости от режима работы исполнительной машины, вида привода и инерционных нагрузок. При чрезмерном запасе сцепления возникают большие динамические нагрузки в процессе пуска машины. В случае недостаточного запаса сцепления наблюдается продолжительное проскальзывание, вызывающее нагрев и износ муфты. На основании накопленного опыта рекомендуются следующие значения допускаемых запасов сцепления:
Для тихоходных муфт (n = 50-700 мин-1)..................................................................................1
Для быстроходных муфт (n = 700-1500 мин-1)................................................................1,6
Необходимые для расчетов технические данные шинно-пневматических муфт приведены в табл. 23.2.
Вращающий момент от рабочей нагрузки рассчитывают по выходной мощности двигателя и наименьшей частоте вращения.
Пневмокамерные муфты отличаются от шинно-пневматических тем, что между баллоном и фрикционными накладками расположены пустотелые башмаки, обеспечивающие вентиляцию и более эффективную теплоизоляцию.
Радиальное смещение осей соединяемых валов вызывает скольжение фрикционных накладок по шкиву, поэтому пневмокамерные муфты наиболее целесообразно использовать для соединения валов с расположенными на них цепными звездочками.
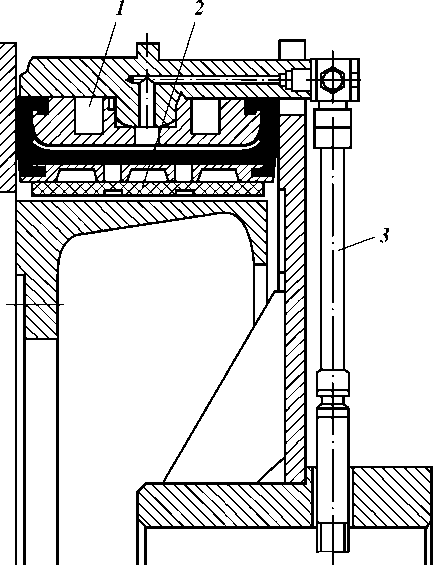
В многокамерных муфтах (рис. 23.15) каждая накладка 2 снабжена отдельной пневматической камерой 1 с самостоятельным каналом 3 для ввода воздуха. Благодаря этому повышается надежность муфты, так как в случае выхода из строя одной и даже нескольких камер многокамерная муфта в отличие от шинно-пневматической и пневмокамерной сохраняет работоспособность.
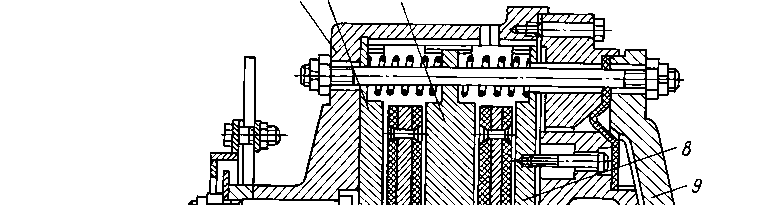
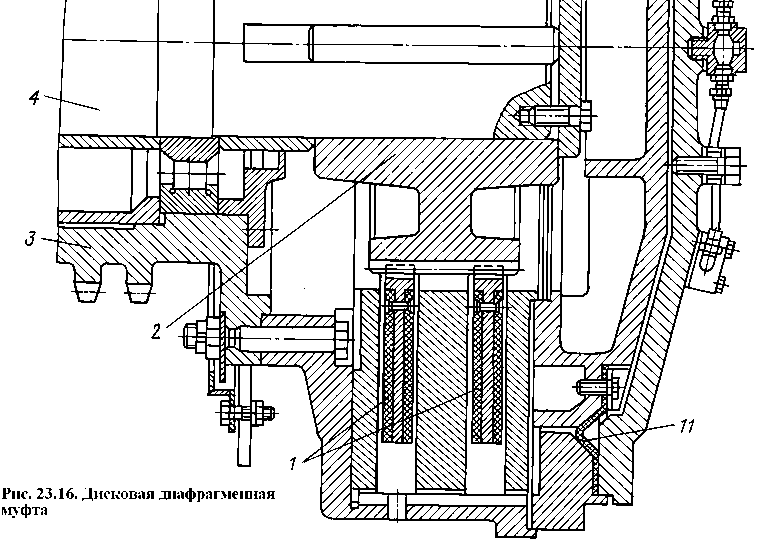
Дисковая диафрагменная муфта (рис. 23.16) для соединения вала 4 с цепной звездочкой 3 состоит из ступицы 2, установленной на торце вала. На наружных шлицах ступицы установлены фрикционные диски 1. Ведо-
Т аблица 23.2
Техническая характеристика шинно-пневматических муфт
|
Типоразмер муфты* |
Максимальный момент сцепления** м0, кН-м | Предельная частота вращения ппр, мин-1 |
Наибольшая частота включений в 1 ч |
Объем камеры баллона, 3 дм | Масса (без шкива), кг |
| МШ300х100 МШ500х125 МШ600х200 МШ700х200 МШ900х200 МШ1070х200 * Буквы о метр шкива му ** При дав | 3 10 23 30 55 80 >бозначают: М -фты, второе — и 5лении в камере | 3100 1800 1600 1400 1000 670 муфта, Ш — шрина фрикцио 0,7 МПа и коэф | 65 40 шинно-пневматг нной накладки. фициенте тренш | 1,7 7,5 15.0 23.0 35.0 46.0 ческая; первое 0,3. | 20 40 65 95 115 145 число — диа- |
мая часть соединена болтами с цепной звездочкой и включает в себя корпус 5, на внутренних шлицах которого установлены опорный 6, промежуточный 7 и нажимной 8 диски. Между нажимным диском и крышкой 9 корпуса муфты размещен пустотелый диск 10 с диафрагмой 11.
Под давлением воздуха, поступающего в камеру между диафрагмой и крышкой, пустотелый диск вместе с нажимным перемещается на длину суммарного зазора между трущимися поверхностями. Для двухдисковой муфты зазор равен 8—14 мм в зависимости от степени износа фрикционных накладок.
При дальнейшем увеличении давления происходит сцепление муфты и передача вращающего момента от вала к свободно сидящей на нем цепной звездочке. При выпуске воздуха из камеры пружины 8 муфты разжимаются и отводят диски в исходное положение. Нажимные устройства дисковых муфт могут быть пневмокамерного и поршневого типов.
Момент сцепления дисковой муфты не зависит от частоты вращения. При одинаковых габаритах дисковая муфта по сравнению с цилиндрической имеет значительно больший момент сцепления. Например, при давлении в камере 0,7 МПа шинно-пневматическая муфта МШ1070х200 при 500 мин-1 имеет момент сцепления M » 40 кН-м, а двухдисковая муфта того же диаметра — M = 100 кН-м. Однако дисковые муфты не допускают угловых и особенно радиальных смещений, вызывающих быстрое изнашивание пар. Кроме того, дисковые муфты дороже в изготовлении и хуже охлаждаются. Указанные недостатки ограничивают их применение в буровых установках.
Момент сцепления дисковой муфты
M = p.PRz, (23.11)
где P — осевая нагрузка, создаваемая нажимным устройством, с учетом противодействия пружин; R — радиус равнодействующей сил трения; z — число пар трения, равное удвоенному числу дисков с фрикционными накладками.
Радиус равнодействующей сил трения с точностью до 3 % можно определить по формуле
R = (D + d)/4,
где D и d — наружный и внутренний диаметры фрикционного диска.
Осевая нагрузка P зависит от давления в камере нажимного устройства, ее опорной площади и противодействия пружин:
P = (Р - P0)F - егпр(Д + 5),
где p — давление в камере нажимного устройства; р0 — давление, необходимое для перемещения нажимного диска, равного суммарному зазору между дисками; F — площадь опорной поверхности камеры; с — жесткость пружины; Епр — число пружин в муфте; Д — предварительный натяг пружины; 5 — суммарный зазор между дисками муфты.
Подставляя полученные значения в формулу (23.11), получают
M = [(р - P0)F - с^пр (Д + 5)]/ [0, 25^z(D + d)].
Дисковые муфты выбирают согласно условию M > Мвр [S], где M — момент сцепления муфты; Мвр — вращающий момент от действующей нагрузки; [S] — запас сцепления.
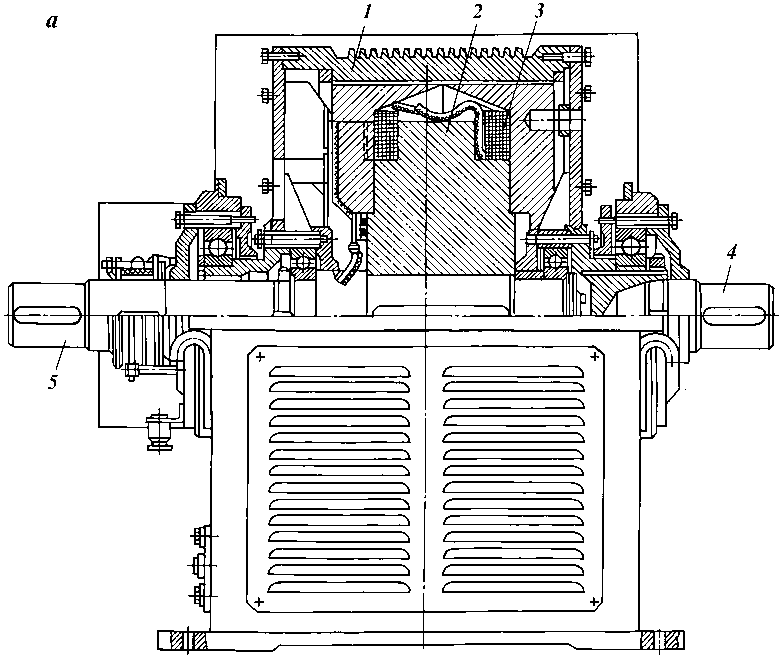
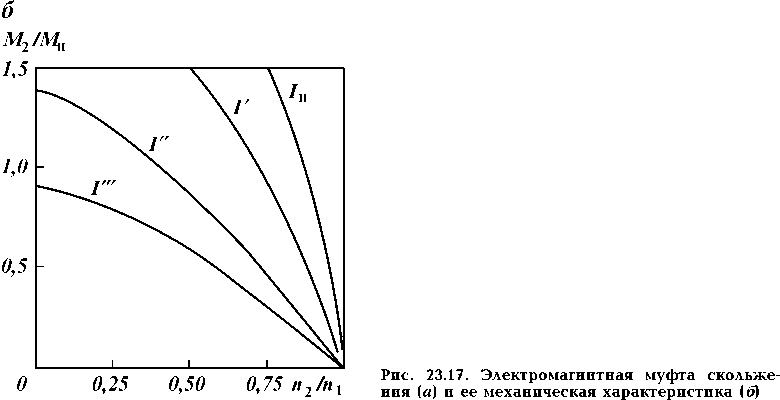
Электромагнитные муфты. Сцепление электромагнитных муфт осуществляется под действием сил магнитного притяжения, возникающих при включении постоянного тока в обмотку возбуждения муфты. В буровых установках применяют индукционные муфты скольжения, сцепляющиеся посредством магнитного поля, и ферропорошковые муфты, имеющие электромеханическую связь.
Электромагнитная муфта скольжения (ЭМС) состоит из концентрич-но расположенных якоря 1 и индуктора 2, на котором установлена обмотка возбуждения 3 (рис. 23.17, а). При включении постоянного тока в обмотку возбуждения возникает магнитный поток, который наводит в якоре переменную электродвижущую силу, в результате чего возникает ток якоря. Взаимодействие тока якоря с магнитным потоком полюсов индуктора приводит к возникновению электромагнитного момента, под действием которого ведомый вал 4 начинает вращаться в направлении ведущего вала 5.
Вращающий момент ЭМС зависит от частоты вращения якоря относительно индуктора и силы тока возбуждения.
На рис. 23.17, б показана механическая характеристика электромагнитной муфты скольжения, выражающая в относительных координатах зависимость частоты вращения ведомого вала n2 от момента сил сопротивления вращению М2 при заданных вращающем моменте Мн и частоте вращения ведущего вала n1; Гн — номинальная сила тока возбуждения, Гн > Г > > Г” > Г". Частота вращения ведомого вала муфты всегда меньше частоты вращения ведущего вала, так как только при скольжении в якоре возникают токи, создающие электромагнитный момент. С увеличением момента сил сопротивления М2 частота вращения ведомого вала муфты снижается. Момент, передаваемый ЭМС, падает с уменьшением тока возбуждения.
В электромагнитной порошковой муфте (МЭП) зазор между ведущей и ведомой полумуфтами заполняют порошком из технически чистого железа. Вследствие этого возрастают магнитная проницаемость зазора и вращающий момент, передаваемый муфтой. В отличие от ЭМС вращающий момент электромагнитной порошковой муфты при неизменной силе тока возбуждения практически не зависит от частоты вращения. Если момент
сил сопротивления, приложенный к ведомой части муфты, превышает рабочий момент МЭП, то происходит проскальзывание.
Продолжительность проскальзывания зависит от теплорассеивающей способности муфты и ограничивается допускаемой температурой нагрева обмотки возбуждения и подшипников муфты. При чрезмерном нагружении частота вращения ведомой полумуфты падает до нуля, и муфта переходит в режим полного скольжения. Электромагнитные порошковые муфты выгодно отличаются от ЭМС массой, габаритами и мощностью, необходимой для возбуждена обмоток. Однако из-за износа порошка в процессе эксплуатации и смерзания его при низких температурах воздуха происходит заклинивание муфты. Эти недостатки ограничивают применение МЭП.
Ниже приведена техническая характеристика электромагнитных муфт:
Тип муфты........................................................................................................................................................................ЭМС-750 МЭП-800
Момент сцепления, кН-м:
Опыт показывает, что электромагнитные муфты значительно повышают эффективность электропривода буровых установок, обеспечивая плавное увеличение частоты вращения разгоняемых масс путем регулирования тока возбуждения. В результате этого стало возможным применение синхронных электродвигателей в приводе буровой лебедки в ряде буровых установок.
23.5. ЦЕПНЫЕ ПЕРЕДАЧИ БУРОВЫХ УСТАНОВОК
В приводах буровых установок широко используют цепные передачи. Такая передача состоит из ведущей и ведомой звездочек и огибающей их цепи. В зависимости от направления вращения звездочки ведущей ветвью цепи может быть как верхняя, так и нижняя. Предпочтительны передачи с верхней ведущей ветвью.
По конструктивному исполнению различают открытые и закрытые передачи с горизонтальным и наклонным расположением оси, соединяющей центры звездочек. Передачи с углом наклона к горизонту до 30° относят к горизонтальным, от 30 до 60° - к наклонным. Вертикальные передачи имеют угол наклона оси к горизонту 60-90° и требуют установки дополнительных устройств для предварительного натяжения цепи.
Различают одно- и многоконтурные цепные передачи. В многоконтурных между соединяемыми валами установлено несколько параллельно расположенных цепных передач с одинаковыми и разными передаточными числами.
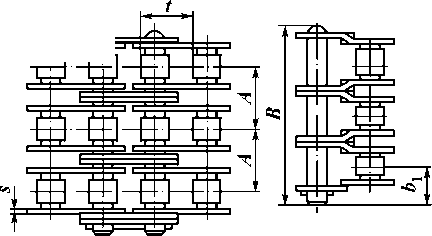
Цепь представляет собой гибкую конструкцию из последовательно соединенных жестких звеньев. Цепи, используемые для передачи механической энергии от одного вала к другому, называют приводными. По конструктивным признакам приводные цепи (рис. 23.18) относят к роликовым. Они состоят из чередующихся наружных и внутренних звеньев, каждое из которых собирается из двух пластин, напрессованных на валики 2 со шплинтом 3 или на втулки 5. Втулки снабжены роликами 6, которые при входе в зацепление со звездочкой проворачиваются относительно втулок. Благодаря этому уменьшается трение и снижается износ поверхностей контакта зубьев звездочки и роликов. Наружные 1 и внутренние 4 пластины по виду напоминают восьмерку.
Площадь поперечного сечения по проушинам примерно равна площади сечения пластины в средней ее части (шейке). Однако, вследствие больших местных напряжений в зоне отверстий, являющихся концентратором напряжений, предел выносливости в поперечном сечении отверстий меньше, чем в шейке пластины. Диаметр отверстий внутренних пластин, растачиваемых по диаметру сопрягаемых с ними втулок, больше диаметра отверстий наружных пластин, растачиваемых по диаметру валиков. Равно-прочность наружных и внутренних пластин обеспечивается благодаря соответствующему увеличению ширины внутренних пластин.
Валики цепи раскатывают либо развальцовывают с одного конца, и они имеют отверстия для шплинта на другом конце. Соединительное звено является частью цепи. Оно состоит из наружной пластины с неподвижно закрепленными валиками (вилки), соединительной пластины и шплинтов. При нечетном числе звеньев цепь соединяется переходным звеном, состоящим из переходных пластин 7, валика, втулки, ролика 8.
В буровых установках вследствие больших нагрузок и скоростей преимущественно используют многорядные цепи (рис. 23.18, б), которые отличаются от однорядных длиной B валиков и наличием промежуточных пластин 9. Наружные пластины соединяют с валиком с натягом, а промежуточные — с зазором 0,02 мм, облегчающим сборку многорядной цепи.
В отличие от нагрузок и внутренних пластин промежуточные изготовляют без фаски на внешнем контуре. Ниже приведены основные параметры пластин (в мм) для цепи с шагом t = 50,8 мм (толщина пластины s = = 6,4 мм):
Тип пластины............................................... Внутренняя Наружная Промежуточная
Пластины цепи изготовляют из холоднокатаного проката повышенной точности, получаемого из стали марки 30ХН3А. После термообработки пластины имеют твердость 38 — 45 HRC. Эта сталь обладает достаточным сопротивлением усталости, хорошей обрабатываемостью и стабильными механическими свойствами после термообработки. Толщина пластины — расчетный параметр цепи, определяющей ее прочность.
Наружное
звено
звено
4 5 6
звено
_Ж
^Ь_
=о
12 3
<5
Переходное Двойное переходное
Наружное
звено
звено
звено
| SWif | |||
| V | Т ||<S> | ) |
4 5 6
fHb Мф
eq
12 3
Рис. 23.18. Приводная роликовая цепь:
Внутреннее
звено
а - однорядная; б - трехрядная
Валик, неподвижно закрепляемый в отверстиях пластин наружного звена, представляет собой цилиндрический стержень с коническими торцами, облегчающими сборку цепи. В собранной цепи конические торцы валиков раскатывают либо развальцовывают. Валики должны обладать достаточной прочностью, износостойкостью и сопротивлением ударным нагрузкам. От диаметра валика зависит прочность цепи и контактное давление в шарнире цепи. Валики изготовляют из стали 12ХН3А по ГОСТ 4543-71 или из стали 25Н3 по ЧМТУ/ЦНИИЧМ 377-60, цементируют на глубину 0,05-0,08 их диаметра, и после термообработки они имеют твердость поверхности 54-61 HRC и сердцевины 43-48 HRC. Концы валиков перед раскатной подвергают отжигу.
Втулки цепи изготовляют из стали марки 12ХН3А или 12ХН2 и подвергают цементации на глубину 0,3 — 0,7 мм для цепей с шагом 1,75 и 38,1 мм и 0,4 — 0,8 мм для цепей с шагом 44,45 — 63,5 мм. Твердость после термообработки 54 — 61 HRC. Втулки входят в отверстия пластины с натягом, и для устранения среза металла торцы их по наружному диаметру скругляют.
Ролики цепи непосредственно контактируют с зубьями звездочек и подвергаются ударам и изнашиванию. Диаметр ролика выбирают в зависимости от шага цепи. Диаметр является исходным параметром для построения профиля звездочки. Ролики изготовляют из стали 30ХН3А и закаливают до твердости 45 — 52 HRC.
Соединения валик — пластина и втулка — пластина, собираемые с натягом, проверяют на проворачивание. Крутящие моменты, необходимые для проворачивания втулок и валиков относительно пластины, возрастают с увеличением шага цепи и должны быть в пределах, регламентированных ГОСТ 21834-76.
Роликовые цепи характеризуются следующими геометрическими параметрами (см. рис. 23.18): шаг t, диаметр ролика d, расстояние между внутренними пластинами Ьвн, ширина цепи B.
Шаг цепи измеряется расстоянием между осями двух роликов внутренних и наружных звеньев при натянутом состоянии цепи под нагрузкой, равной 0,01 разрушающей нагрузки. Различают действительный шаг, измеряемый между смежными звеньями, и средний шаг, определяемый как частное от деления длины некоторого отрезка цепи на число звеньев, входящих в данный отрезок: t = ln/mt.
Число звеньев в измеряемом отрезке зависит от шага:
Шаг, мм................................................................................25,4 31,75 38,1 44,45 50,8 51,15 63,5
Число звеньев..........................................................49 47 39 33 29 25 23
В изношенной цепи шаг внутренних и наружных звеньев неодинаков, поэтому необходимо определять средний шаг ^р на отрезке цепи, содержащем не менее 10 четных чисел звеньев. Удлинение цепи (вытяжка) вследствие изнашивания шарниров, %,
(ср -1
Д = -100.
t
Диаметр ролика d определяет радиусы впадин сопряжения и головки зуба звездочек. Отношение шага к диаметру ролика принимают за геометрическую характеристику зацепления цепи X = t/d. Расстояние между внутренними пластинами Ьвн и между осями рядов А цепи определяют размеры поперечного профиля звездочки.
Разрушающая нагрузка Pp цепи соответствует минимальной статической нагрузке, при которой начинается разрушение цепи. Ее определяют путем растяжения цепи на универсальных разрывных машинах.
Технические условия на приводные роликовые цепи буровых установок регламентированы ГОСТ 21834-76, который также предусматривает изготовление цепей двух типов: нормальных Н и тяжелых Т (с утолщенными пластинами). Нормальные цепи легче тяжелых, они могут работать при более высоких (на 10-15 %) скоростях движения цепи. Однако при малых и средних скоростях они имеют меньший срок службы (на 10-15 %).
Цепи для буровых установок должны удовлетворять следующим техническим требованиям:
крутящие моменты при испытании на проворачивание валика в пластине должны быть в пределах 18—160 Н-м и втулок в пластине — в пределах 11 — 100 Н-м в зависимости от шага и типа цепи;
предельные отклонения длины измеряемого отрезка цепи, состоящего из 11 звеньев, от номинального значения должны быть только положительными и составлять 0,15 %;
предельное отклонение действительного шага от его номинального значения по длине цепи, а также разность действительных шагов в каждом ряду по ширине цепи должны строго соответствовать принятым нормам;
разность посадочных размеров промежуточных пластин одного наружного звена не должна быть более 0,02 мм для цепей с шагом 25,4 —
38,1 мм и более 0,03 мм для цепей с шагом 44,45 — 63,5 мм;
предельная амплитуда напряжений промежуточных пластин должна быть не менее 50 МПа при базе испытаний 5-106 циклов, для чего рекомендуется их упрочнять путем дорнования и обжатия краев отверстий;
каждая собранная цепь должна быть обтянута в течение не менее 1 мин на стенде при нагрузках 0,25 — 0,33 соответствующей разрушающей нагрузки;
ресурс цепи до списания должен быть не менее 3000 ч при коэффициенте запаса по сопротивлению усталости, равном 1,1;
собранная цепь должна иметь легкую (без заедания) подвижность в шарнирных соединениях, проверяемую поворотом звеньев цепи рукой на 90°;
цепи не должны иметь пропеллерности и серповидности, препятствующих замыканию цепи в контур усилием руки;
детали цепи не должны иметь окалины, трещин, заусенцев и коррозии; для защиты от коррозии пластины цепей подвергают фосфатиро-ванию;
длину цепи устанавливают по согласованию с потребителем. Примеры условных обозначений. Цепь однорядная нормальная с шагом 38,1 мм: 1Н =38,1 ГОСТ 21834 — 76. Цепь трехрядная тяжелая с шагом 44,45 мм: 3Т-44,45 ГОСТ 21834 — 76. Переходное звено однорядной цепи нормального типа с шагом 50,8 мм: П-1Н-50,8 ГОСТ 21834 — 76. Переходное звено двухрядной цепи тяжелого типа с шагом 50,8 мм: Д-2Т-50,8 ГОСТ 21834-76.
ЗВЕЗДОЧКИ К ЦЕПЯМ
Колеса цепных передач в отличие от зубчатых называют звездочками. Долговечность и надежность цепной передачи зависят от правильного выбора формы зуба, материала, термообработки и точности изготовления звездочек. Форма зуба определяется продольным профилем, являющимся основным, поперечным профилем и профилем сечений зуба в плане. Для нормального взаимодействия с цепью форма зуба звездочек должна обеспечить плавное зацепление со звеньями цепи и минимальные контактные давления, а также устранить возможность соскакивания изношенной цепи со звездочки при увеличении шага цепи в пределах установ-
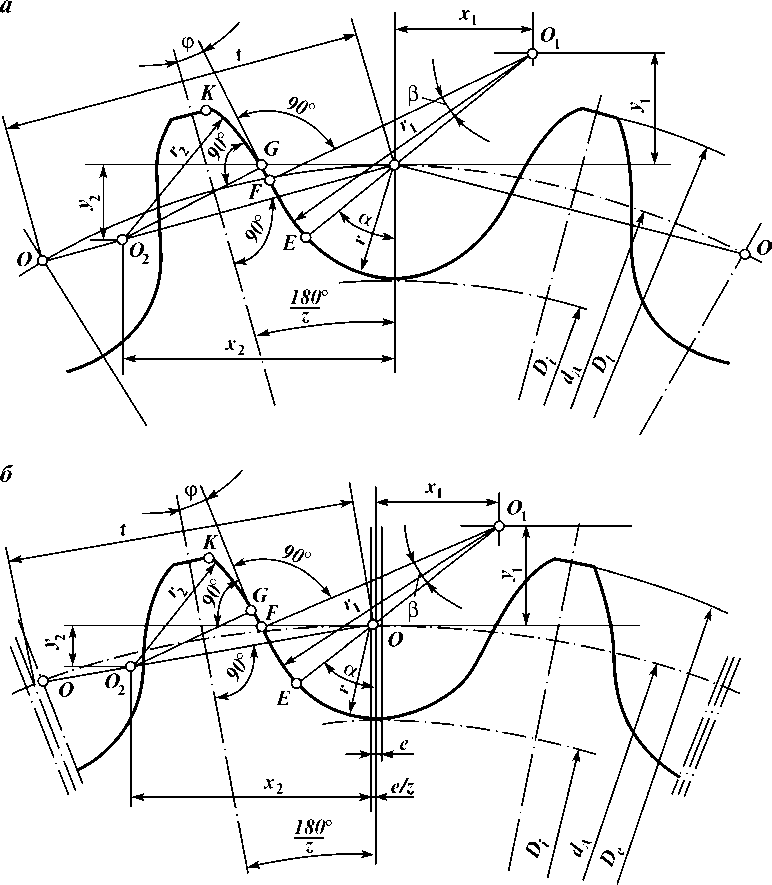
Рис. 23.19. Профиль зубьев звездочек:
а - без смещения центров дуг впадин; б - со смещением
ленной нормы. Наряду с этим форма зуба должна быть простой в изготовлении.
Наиболее полно указанным требованиям отвечает форма зуба с вогнуто-выпуклым основным профилем (рис. 23.19), параметры которого регламентированы ГОСТ 591-69. Стандарт устанавливает два профиля зубьев звездочек: без смещения центров дуг впадин и со смещением. Звездочки с профилем без смещения центров дуг впадин рекомендуется применять в
| Параметр |
Расчетная формула |
| Шаг цепи t Диаметр ролика цепи d Число зубьев z Диаметр делительной окружности d,^ Диаметр окружности выступов D, Диаметр окружности впадин D, Наибольшая хорда (для контроля звездочек с нечетным числом зубьев) Lx Радиус впадины r Радиус сопряжения а Радиус головки зуба r2 Половина угла впадины а Угол сопряжения р Половина угла зуба ф Прямой участок профиля FG Расстояние от центра дуги впадины до центра дуги головки зуба 0О2 Смещение центров дуг впадин e Координаты точек: Х1 У1 Х2 У2 Примечание. Линейные размеры — в | По ГОСТ 21834—76 То же По конструктивным соображениям , 180 t d, = t cosec-=- д 2 sin(180/ z) f 180 Л D, = 11 0,5 + ctg-I D, = d(^ — 2r 95 Lx = d. cos--2r x д z r = 0,5025D + 0,05 Г1 = 0,8D + r = 1,3025D + 0,05 r2 = D(1,24 cos ф + 0,8 cos p — 1,3025) — 0,05 а = 55 — 60/z p = 18 — 56/z ф = 17 — 64/z = 90—180/z - (а+ p) FG = (1,24 sin ф — 0,8 sin p) ОО2 = 1,24 e = 0,03t x1 = 0,8D sin а y1 = 0,8D cos а x2 = 1,24D sin 180/z У2 = 1,24D sin 180/z миллиметрах, угловые — в градусах. |
особо точных передачах. В буровых установках применяют звездочки со смещенными центрами дуг впадины, отличающиеся тем, что впадина зуба очерчивается из двух центров, смещенных на величину
е = 0,03t.
Расчет и построение теоретического (исходного) профиля зубьев выполняют в соответствии с рис. 23.19 и данными табл. 23.3. Диаметр окружности выступов следует вычислять с точностью до 0,1 мм, остальные линейные размеры — до 0,01 мм, а угловые — до 1'.
Наиболее распространены звездочки, у которых сечение зуба в плане представляет собой прямоугольник. Для устранения перекосов при контакте роликов цепи с зубьями звездочки необходимо обеспечить перпендикулярность образующей зуба к торцу венца и параллельность с осью отверстия ступицы.
Искажение профиля зубьев звездочек ухудшает работу передач и приводит к преждевременному разрушению цепи, поэтому материал и термообработка должны обеспечить прочность и износостойкость зубьев. В цепных передачах буровых установок звездочки изготовляют из сталей марок 40Х, 40Г2, 50Г2, 35ГС, 40ХНЛ9Ф с поверхностной закалкой до твердости 42 — 52 HRC. Предельные отклонения и допуски на шаг, диаметр
окружности выступов, впадин и другие конструктивные размеры зубьев в зависимости от шага и числа зубьев звездочки регламентированы ГОСТ 591-69.
ОСНОВНЫЕ СИЛОВЫЕ И КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЦЕПНЫХ ПЕРЕДАЧ
Работающая цепь испытывает нагрузки от натяжений в ведущей и ведомых ветвях. В ведомой ветви действуют натяжения от центробежных сил Рц и провисания цепи Pf:
Р2 = Рц + Pf. (23.12)
Натяжение, вызываемое центробежными силами,
Рц = qv2, (23.13)
где q - масса 1 м цепи; v — скорость цепи, м/с.
Натяжение от провисания ведомой ветви
Pf = 9,8 KfqA, (23.14)
где A - межосевое расстояние, м; Kf = 1 + 5 cos2 у - коэффициент, учитывающий угол у наклона линии центров звездочек к горизонту.
В ведущей ветви нагрузка Р1 суммируется из полезного усилия Р, динамической нагрузки Рд и натяжения Р2 ведомой ветви:
Р = Р + Рд + Р2. (23.15)
Динамические нагрузки вызываются неравномерностью движения цепи и ведомой звездочки, технологическими погрешностями, допущенными при изготовлении и монтаже цепи и звездочек. На динамику цепных передач неблагоприятно влияет относительное удлинение цепи в результате изнашивания ее шарнирных соединений. Длина ведущей ветви цепной передачи изменяется также вследствие радиальных биений валов и зубчатых венцов, а также наличия зазоров между ступицей звездочки и валом. В связи с этим погрешности изготовления и монтажа цепных передач должны быть в пределах допускаемых значений. На практике при расчете цепных передач буровых установок динамические нагрузки учитываются коэффициентом перегрузки.
Детали цепи испытывают повторно-переменные асимметричные нагрузки. Для цепи средняя нагрузка
Рср * (Р + Р2)/2, (23.16)
а амплитуда
Ра * (Р - Р,)/2. (23.17)
Однократная смена нагрузок, происходящая за один оборот цепи, соответствует одному циклу нагружения. Период одного цикла Тц зависит от длины и скорости цепи:
Tv = L = Ltt,
где L и Lt - длина замкнутого контура цепи, в мм и шагах; v = ztn/60 -средняя скорость цепи, мм/с; t - шаг цепи; мм; n - частота вращения звездочки, мин-1.
За время T (в ч) число циклов нагружения
N = T / Тц = 60TznLt. (23.19)
Из формулы (23.19) следует, что в течение заданного времени число циклов нагружения одновременно работающих цепей может быть различным в связи с их разной скоростью.
Передаточное число i определяют из равенства средней скорости цепи на быстроходной и тихоходной звездочках:
zjtn, = z^n^,, откуда
i = n1/n2 = z2/z1,
где n1, z1 - частота вращения и число зубьев быстроходной звездочки; n2, z2 - то же тихоходной звездочки.
В пределах одного оборота действительная скорость цепи изменяется вследствие того, что звездочка является не цилиндром, а многогранником. С увеличением числа зубьев звездочки скорость становится более равномерной, что способствует снижению уровня динамических нагрузок в цепи и других элементах привода.
Соотношение между моментом M (в кН-м) и передаваемой мощностью (в кВт) определяется известной формулой
M = N / ю = 9,55N / n * N/(0,1n). (23.20)
Полезное усилие, или нагрузка на цепь,
Р = 2M / dA, (23.21)
где dд - диаметр делительной окружности звездочки.
Момент на ведомом валу
М2 = 4iMt. (23.22)
КПД цепной передачи зависит от потерь мощности на трение в шарнирах цепи и подшипниках. Для точно изготовленных передач на подшипниках качения со струйным смазыванием цепи КПД составляет 0,96-0,98. В расчетах цепных передач буровых установок независимо от шага и числа рядов цепи принимают п = 0,97. Расчетная нагрузка на валы цепной передачи несколько больше полезного окружного усилия вследствие натяжения цепи от веса и равна для горизонтальной передачи Рв = 1,15Р, для вертикальной передачи Рв = 1,05Р.
23.6. СИЛОВЫЕ АГРЕГАТЫ
И ДВИГАТЕЛИ СОВРЕМЕННЫХ БУРОВЫХ УСТАНОВОК
ДИЗЕЛЬНЫЕ И ДИЗЕЛЬ-ГИДРАВЛИЧЕСКИЕ АГРЕГАТЫ
Эти агрегаты используют для привода основных механизмов буровых установок (буровой лебедки, ротора и буровых насосов).
Дизельный агрегат включает дизель и системы обслуживания (охлаждения, смазывания, пуска, контроля и др.), гарантирующие его надежную работу в пределах заданного срока службы. Дизель-гидравлические агрегаты оборудованы гидротрансформатором с системами его обслуживания.
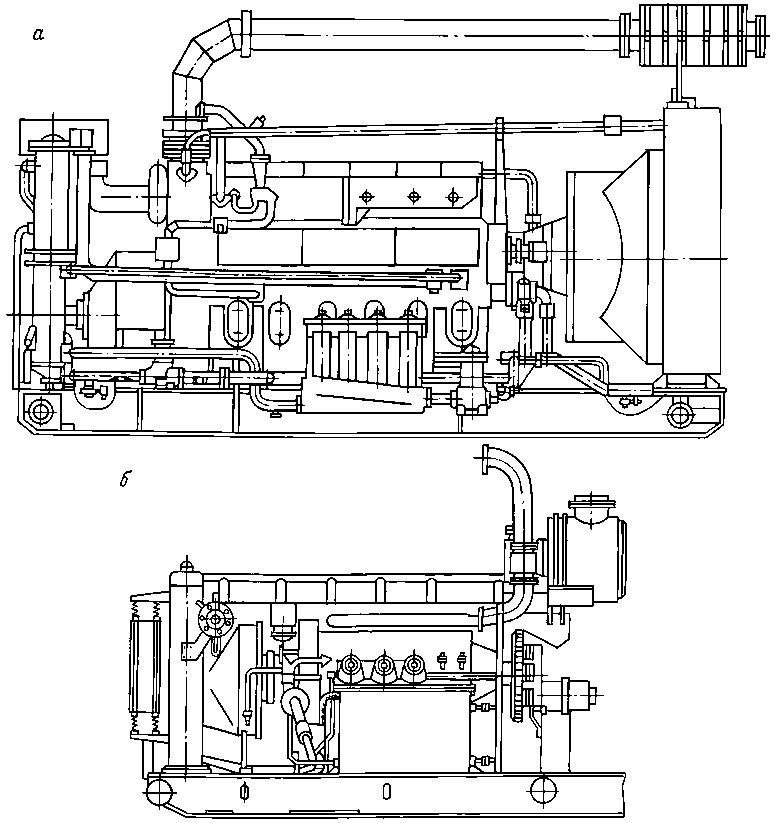
| Показатель |
СА10-1 | СА-30 |
В2-500ТК-С4 |
| Дизель | 6ЧН21/21 | 12Ч15/18 | |
| Число цилиндров | 6 | 12 | |
|
Расположение цилинд |
Рядное | V-образное | |
| ров | |||
| Диаметр цилиндров, мм | 210 | 150 | |
|
Ход поршня, мм | 210 |
180 | |
| Номинальная мощ | 463,2(630) |
330(450) | |
| ность, кВт (л.с.) | |||
|
Частота вращения коленчатого вала, мин-1: | |||
| при номинальной | 1200 |
1600 | |
| мощности |
|||
| при максимальном | 850 |
1150 | |
| крутящем моменте | |||
| максимально | 540 | 600 | |
| устойчивая холосто- | |||
| го хода | |||
| максимальная без |
1500 | 1900 | |
|
нагрузки, ограни | |||
| ченная регулятором | |||
|
Степень сжатия | 13,5 | 14-15 | |
|
Направление вращения |
По часовой стрелке | ||
| (со стороны вентилято- | |||
| ра) | |||
| Удельный расход топ | 153+8 | 162+8 | |
| лива при номинальной | |||
|
мощности, г/(л.с.-ч) | |||
| Удельный расход масла | |||
| при номинальной мощ | |||
| ности, г/(л.с.-ч): | |||
| на угар | 1,0 | Не более 1,2 |
|
| общий | 1,34 | - | |
| Привод вентилятора |
Регулируемый |
Нерегулируемый | |
|
Система наддува |
Турбонаддув | ||
|
Демпфер крутильных |
Жидкостного типа | ||
|
колебаний | |||
| Система смазывания | Принудительная под давлением с «сухим» картером | ||
|
Система охлаждения |
Замкнутая | ||
|
Система предпускового |
Имеется | Нет | |
|
подогрева | |||
| Система аварийно |
Имеется | Имеется | |
| принудительной сигна | |||
| лизации |
|||
|
Назначенный срок (ре | 10 000 | 7000 | |
| сурс) до первой пере- | |||
| борки, ч | |||
| Срок службы до капи | 40 000 | 15 000 |
|
| тального ремонта, ч |
|||
| Габаритные размеры, | |||
| мм: | |||
| длина | 2515 |
1850 | |
| ширина | 950 | 1036 | |
|
высота | 1800 |
1070 | |
| Масса, кг | 4800 | 1450 | |
| Г идротрансформатор |
Г3-675 | - | - |
| Мощность номиналь |
463,2 | - | - |
| ная, кВт | |||
| Номинальная частота |
1200 | - | - |
| вращения, мин-1 | |||
| КПД с учетом отбора | 88±2 | - |
- |
| мощности на насос, % | |||
| Агрегат | |||
| Номинальная мощность |
375(510) | 441,2(600) |
317(432) |
| на выходе, кВт (л.с.) | |||
|
Показатель | СА10-1 |
СА-30 | В2-500ТК-С4 |
| Эксплуатационный диапазон частоты вращения выходного вала, мин-1 |
650-1000 | 650-1000 |
750-1650 |
| Соединение гидротрансформатора с валом дизеля |
Эластичная муфта | ||
| Размер от основания до оси выходного вала, мм Габаритные размеры, мм: | 750 | 490 |
564 |
| длина |
4280 | 3880 | 2900 |
| ширина | 1500 |
1508 | 1580 |
|
высота | 2855 | 2212 | 1500 |
| Масса, кг | 8500 | 7200 |
2200 |
Дизели снабжены демпферами крутильных колебаний, обеспечивающими их работу в широком диапазоне оборотов коленчатого вала, а также системами предпускового запуска аварийно-принудительной сигнализации.
В табл. 23.4 приведена техническая характеристика дизельных агрегатов, а на рис. 23.20, 23.21 показан их общий вид и даны внешние характеристики (N и Мд — соответственно мощности и крутящий момент дизеля; N и Ма — мощность и крутящий момент агрегата; n - частота вращения выходного вала.
Дизель-гидравлический агрегат САТ-450. В буровых установках БУ2900/175ДГУМ1 и БУ1600/ю0дГУ для привода основных механизмов применяют дизель-гидравлический агрегат САТ-450, состоящий из дизеля В8-500ТК-С4 и турботрансформатора с необходимыми системами
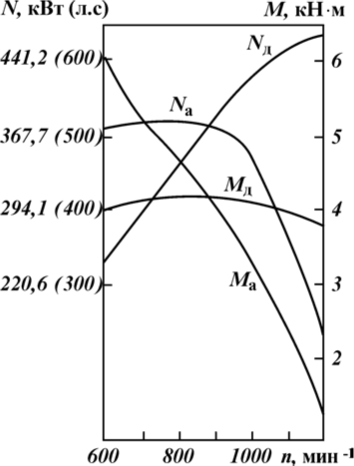
Рис. 23.21. Внешние характеристики дизеля 6ЧН21/21 и агрегата СА10-1
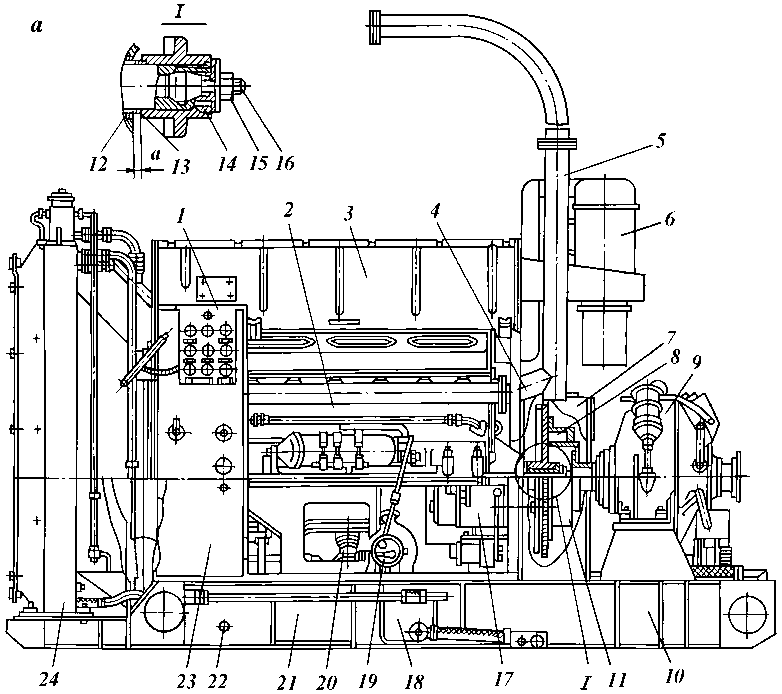
Рис. 23.22. Конструктивная схема (я) ди-зель-гидравлического агрегата САТ-450 и его внешняя характеристика (б):
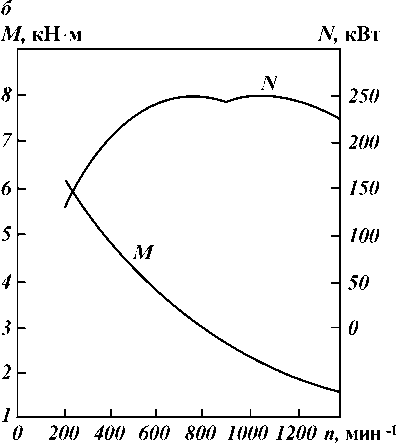
I — щиток контрольно-измерительных
приборов; 2 — двигатель В2-450АВ-С3; 3 — капот; 4 — маховик; 5 — выхлопная труба; 6 — воздухоочиститель; 7 — кожух соединительной муфты; 8 — резиновый палец; 9 — турботрансформатор; 10 — рама;
II — соединительная муфта; 12 — проста-новочная шайба; 13, 14 — конические кольца; 15 — пробка; 16 — гайка; 17 — стартер; 18, 21 — крышки; 19 — маслозакачивающий насос; 20 — горловина; 22 — наконечник; 23 — кожух; 24 — радиатор; а — регулируемый зазор их обслуживания. На рис. 23.22, а, б - приведены общий вид этого агрегата и его внешняя характеристика. Ниже даны параметры агрегата САТ-450:
Турботрансформатор ТТ-560К
Номинальная мощность, кВт (л.с.)..........................................................................................................................................................................294(400)
Номинальная частота вращения, мин-1 (с-1)....................................................................................................................................1350(22,5)
Агрегат
Номинальная мощность на выходном валу, кВт (л.с.)......................................................................................................250(340)
Эксплуатационный диапазон частоты вращения выходного вала, мин-1..................................550- 1350
Соединение турботрансформатора с валом дизеля....................................................... Эластич
ная муфта
Дальнейшее направление повышения эффективности привода буровых установок - использование более мощных отечественных дизелей: 6ЧН-21/21 с номинальной мощностью 464 кВт при 1200 мин-1 и 6ЧН-26/26 с номинальной мощностью 736 кВт. С увеличением единичной мощности сокращается число дизелей буровой установки и, следовательно, упрощается конструкция силовых передач, снижаются потери от спарки дизелей. В ди-зель-электрических агрегатах, используемых в качестве источников питания электродвигателей вспомогательных механизмов буровой установки, применяют дизели ЯМЗ-238А; К-153 и У1Д6С2.
ГАЗОТУРБИННЫЕ ДВИГАТЕЛИ
В отличие от дизеля эти двигатели преобразуют тепловую энергию в механическую не циклически, а непрерывно. На рис. 23.23, а показана простейшая схема, поясняющая принцип действия двухвального газотурбинного двигателя, который используют в приводе буровых установок. Атмосферный воздух, проходя через ступени компрессора К, сжимается и под давлением поступает в камеру сгорания КС. В этой камере воздух смешивается с топливом, подаваемым форсунками. В результате сгорания образовавшейся смеси создается газовый поток, который поступает в турбину компрессора ТК и свободную турбину ТС.
Рабочие колеса турбины компрессора и свободной турбины установлены на отдельных валах и связаны между собой газодинамически. В лопаточных аппаратах турбин энергия сжатого и нагретого газа преобразуется в механическую работу. Мощность турбины компрессора ТК расходуется на вращение компрессора и других агрегатов обслуживающих двигатель. Мощность свободной турбины ТС через редуктор Р передается на выводной вал В, соединяемый с приводимым агрегатом. Газотурбинные двигатели снабжены устройствами для пуска, а также для автоматического и ручного управления двигателем.
Двухвальный газотурбинный двигатель обладает сравнительно высоким запасом крутящего момента (рис. 23.23, б). Максимальный момент в 1,5-2 раза превышает момент при номинальном режиме. По сравнению с
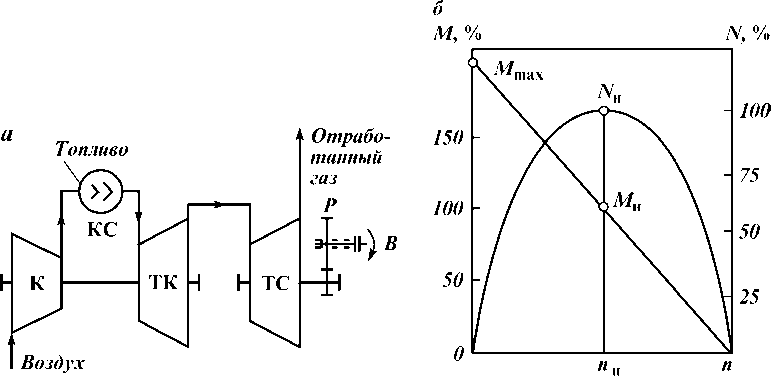
Рис. 23.23. Схема (я) двухвального газотурбинного двигателя и его характеристика (б)
дизелем газотурбинный двигатель обладает более мягкой характеристикой. Его способность резко снижать частоту вращения при загрузке свободной турбины с последующим быстрым выходом на номинальный режим работы является преимуществом, благодаря которому упрощаются пусковые устройства в приводе буровой лебедки, насосов и ротора.
Ниже приведена характеристика стационарного газотурбинного двигателя АИ-23СГ:
Типа двигателя................................................................ Газотурбинный со свободной силовой
турбиной
Частота вращения ротора, мин-1:
турбокомпрессора............................................................................................................(9000-14 600)±150
свободной турбины........................................................................................................(8000-11 000)±120
Тип редуктора................................................................. Планетарный двухступенчатый
Передаточное отношение..........................................................................................0,08732
Топливо для двигателя................................................... Природный (ГОСТ 5542-78) иди по
путный нефтяной газ
Применяемое масло....................................................... Смесь масел (по объему): 75 %
трансформаторного иди МК-3 и 25 % МК-22 или МС-20
Компрессор...................................................................... Осевой 10-ступенчатый
Турбина (компрессора, свободная силовая)............. Осевая двухступенчатая
Связь между турбинами............................................... Гидродинамическая
Габаритные размеры, мм:
длина..........................................................................................................................................................3650±5
Удельная масса газотурбинного двигателя составляет примерно 1,22 кг/кВт и почти в 7 раз меньше, чем дизеля, поэтому значительно уменьшаются масса и габариты привода и всей буровой установки. Возможность непосредственного соединения выводного вала газотурбинного двигателя с валом трансмиссии упрощает конструкцию и повышает КПД привода. Отсутствие водяного охлаждения облегчает пуск и эксплуатацию двигателя в зимних условиях. Моторесурс газотурбинных двигателей при эксплуатации в бурении достигает 9500 ч, а расход масел почти в 10 раз меньше, чем у дизелей.
Благоприятные пусковые свойства и другие положительные качества этих двигателей свидетельствуют об их конкурентоспособности с более распространенными дизелями. Основные недостатки газотурбинных двигателей - повышенный расход топлива и высокий уровень создаваемого шума. Удельный расход топлива примерно в 2 раза больше, чем у дизелей, поэтому буровые установки с газотурбинными двигателями экономически эффективны при наличии доступных местных ресурсов топлива.
ЭЛЕКТРОДВИГАТЕЛИ ПЕРЕМЕННОГО И ПОСТОЯННОГО ТОКА
СПЕЦИАЛЬНЫХ МОДИФИКАЦИЙ
Эти двигатели используют в приводе буровых установок. Валы двигателей, устанавливаемые на щитовых подшипниках, имеют один свободный конец для соединительной муфты.
В числе преимуществ электродвигателей при использовании их в приводе буровых установок следует отметить экономичность и надежность, способность реверсирования и преодоления кратковременных перегрузок, бесшумность работы.
Асинхронные двигатели с фазным ротором применяют в приводе лебедки, насосов и ротора, Этими двигателями управляют с помощью специальных станций, которые осуществляют плавный пуск двигателя с малым пусковым током. Техническая характеристика асинхронных двигателей лебедки, насосов и ротора отечественных буровых установок приведена в табл. 23.5. Номинальная мощность, указанная в таблице, соответствует режиму длительной работы, при котором двигатель не перегревается сверх установленной температуры. Момент Мн, соответствующий номинальному режиму, называют номинальным моментом. Отношение максимального момента Мм к номинальному Мн характеризует перегрузочную способность двигателя. Кратность пускового момента определяется отношением момента, развиваемого двигателем в неподвижном состоянии, к номинальному моменту.
Электродвигатели серии АКБ, используемые в приводе буровых лебедок, рассчитаны для работы в повторно-кратковременном режиме с числом включений не более 100-120 и числом реверсов 10-20 в 1 ч. Электродвигатели серии АКБ - закрытого исполнения с принудительной вентиляцией
Таблица 23.5
Техническая характеристика асинхронных двигателей буровых установок
|
Тип двигателя | Номи нальная мощность, кВт |
Номинальное напряжение, В |
Частота вращения, мин-1 | КПД, % | Мм Мн | Момент инерции ротора, кг-м2 | Масса, кг |
|
АКБ-114-6 | 500 |
980 | 92,5 | 2,5 |
2,25 | 2150 | |
|
АКБ-12-39-6 | 320 |
985 | 91,5 | 2,3 |
4 | 2810 | |
|
АКБ-13-62-8 | 500 |
740 | 93,5 | 2,5 |
10,7 | 4320 | |
|
АКЗ-15-41-8Б2 | 700 |
6000 | 2,6 |
6150 | |||
|
АКЗ-15-41-8Б | 850 | 94,5 | 2,7 | 6800 | |||
| АКСБ-15-44-6 |
630 | 750 |
94,7 | — | 3700 | ||
| АКСБ-15-54-6 |
800 | 94,9 |
1,8 | 4100 | |||
|
АКСБ-15-69-6 | 1000 | 95,3 |
4700 |
или самовентиляцией - предназначены для тяжелых условий работы с частыми пусками и регулированием частоты вращения путем искусственного воздействия на их электромеханические параметры. Электродвигатели этой серии используют в приводе буровых насосов, они регулируются по способу, получившему название вентильно-машинного каскада. Привод состоит из асинхронного двигателя насоса, трехфазного выпрямительного моста для преобразования энергии скольжения двигателя в энергию постоянного тока и источника ЭДС в качестве которого используют генератор постоянного тока мощностью 250 кВт с приводным синхронным двигателем.
При холостом ходе cos ф двигателя составляет примерно 0,2 и достигает максимального значения 0,7-0,9 при нагрузках, близких к номинальным N2h. Естественным способом улучшения cos ф является полная загрузка асинхронных двигателей. КПД определяется отношением полезной мощности N2 к подводимой N1. У большинства двигателей КПД достигает максимума (65-95 %) при нагрузке, равной 75 % номинальной. Благодаря этому обеспечивается экономичность двигателей при преобладающих на практике режимах нагружения.
Отклонения напряжения и частоты тока от номинальных значений изменяют механические характеристики асинхронного двигателя. Момент вращения пропорционален квадрату напряжения, поэтому для нормальной работы двигателя необходимо стабильное напряжение в сети.
Асинхронные электродвигатели с короткозамкнутым ротором проще и дешевле двигателей с фазным ротором, не требуют сложной пусковой аппаратуры. Привод вспомогательных машин и механизмов буровых установок преимущественно осуществляется асинхронными электродвигателями с короткозамкнутым ротором. Исключение составляют вспомогательная лебедка, в приводе которой используют асинхронный двигатель с фазным ротором, и автоматический регулятор подачи долота, силовой узел которого приводится от двигателя постоянного тока.
В приводе буровой лебедки синхронные электродвигатели вследствие абсолютной жесткости используют с электромагнитными муфтами скольжения, обеспечивающими плавный пуск и относительно небольшое регулирование привода. В приводе буровых насосов синхронные электродвигатели устанавливают с фрикционными муфтами. Буровые установки, снабженные синхронными двигателями в приводе лебедки, имеют асинхронные двигатели в приводе насосов. И наоборот, если в приводе лебедки используют асинхронные двигатели, то в приводе насосов - синхронные. Лишь в отдельных случаях лебедка и насосы буровой установки имеют привод от синхронных двигателей.
Техническая характеристика синхронных электродвигателей отечественных буровых установок приведена в табл. 23.6. Вращающий момент, развиваемый двигателем, и сила тока статора с повышением нагрузки возрастают практически линейно. Так как частота вращения постоянна, мощность также увеличивается линейно. Характерная особенность синхронного двигателя - его способность работать с любым значением cos ф. Это достигается регулированием силы тока возбуждения. При неизменном токе возбуждения повышение нагрузки на валу двигателя вызывает некоторое уменьшение cos ф.
Кривая КПД синхронного двигателя, как и других электрических машин, изменяется в зависимости от нагрузки. Максимум КПД соответствует нагрузкам, близким к номинальным, и для синхронных двигателей буровых
| Тип двигателя | Номинальная мощность, кВт | Частота вращения, мин-1 | КПД, % | Мм Мн |
Масса, кг |
| СДЗ-12-46-8А | 320 | 750 |
1,8 | 3200 | |
|
СДЭ-13-34-6 | 500 | 1000 | 94 | 1,9 |
3570 |
| СДБ-13-42-8А |
93,9 | 1,46 |
|||
| СДЗБ-13-42-8 |
450 | 1,9 |
4050 | ||
| СДБ-14-46-8 |
850 | 750 | 94 |
2,2 | 6500 |
|
СДЗ-13-52-8А | 95 | 1,44 | 5420 | ||
| СДБО-99-49-8А | 630 | 94,5 | 2,2 | 5600 | |
| Примечание. Для всех указанных типов номинальное напряжение — 6000 В. | |||||
установок равен 94-95 %. Основные преимущества синхронных двигателей - возможность их работы с cos ф = 1 и способность улучшать (приближать к единице) cos ф в системах, в которых работают асинхронные двигатели. Момент вращения синхронного двигателя зависит от напряжения в сети в первой стадии. В связи с этим синхронные двигатели по сравнению с асинхронными обладают более стабильным моментом вращения при колебаниях напряжения в сети. Пуск синхронного двигателя возможен после предварительного разгона ротора до частоты вращения, близкой к синхронной, с помощью дополнительного двигателя либо специальной короткозамкнутой обмотки в роторе, усложняющих конструкцию и повышающих стоимость синхронных двигателей.
Электродвигатели постоянного тока в отличие от асинхронных и синхронных обладают свойством саморегулирования и по естественным механическим характеристикам полнее отвечают требованиям, предъявляемым к основному приводу буровых установок. Вследствие плавного изменения частоты вращения в зависимости от момента, создаваемого рабочей нагрузкой, повышаются производительность и экономичность буровой лебедки, насосов и ротора. В буровых установках двигатели постоянного тока получают питание от электромашинных и тиристорных преобразователей переменного тока, поступающего от промышленной электросети или автономных дизель-электрических станций.
Отсутствие надежных и дешевых источников питания, ограниченный выбор необходимых для буровых установок двигателей, повышение требований к техническому обслуживанию и другие факторы на определенном этапе затрудняли внедрение электропривода постоянного тока. В связи с
Таблица 23.7
Техническая характеристика двигателей постоянного тока буровых установок
| Тип двигателя |
Мощность (длительная), кВт |
Напряжение, В | Частота вращения, мин-1 |
|
П-179-9К | 1150 | 660 | 220/440 |
| П-153-8К | 370 | 220 |
750/900 |
| П-172-12К |
950 | 660 | 400/100 |
| МПЭ-800-800 | 800 |
460 | 800/1200 |
|
ДПЗ-99/74-8КМ2 | 710 |
— | 200/400 |
|
МПП-1000-1000 МЗ | 800 |
460 | 800 |
|
ПС-152-5К | 320 | — | 400/1000 |
| П-125-8К | 230 | — |
750/1000 |
этим первоначально двигатели постоянного тока использовали в единичных образцах буровых установок, предназначенных для сверхглубокого бурения. На основе накопленного положительного опыта в последующем были созданы буровые комплексы с электроприводом постоянного тока для плавучей (Уралмаш 6000 ПЭМ) и полупогружной (Уралмаш 6000/60 ППЭМ) буровых установок.
В последние годы ведутся опытно-конструкторские разработки и промышленные испытания тиристорного электропривода с питанием от промышленных электросетей. За рубежом электропривод постоянного тока используют преимущественно в дизель-электрических буровых установках.
Основные технические данные двигателей постоянного тока, используемых в отечественных буровых установках, приведены в табл. 23.7.
23.7. КОМПОНОВКА СИЛОВЫХ ПРИВОДОВ И ТРАНСМИССИЙ
Электропривод переменного и постоянного тока. Независимо от рода тока компоновка многодвигательных электроприводов зависит от типа передачи и способа блокирования.
На рис. 23.24 приведена схема блокирования электродвигателей переменного или постоянного тока. Каждая из этих схем имеет преимущества и недостатки, и выбор той или иной компоновки зависит от ряда факторов.
1. Допустимая мощность, передаваемая трансмиссией на промежуточный вал. Если мощность двигателей меньше допустимой для трансмиссии, то предпочтительнее схема на рис. 23.24, а с одной передачей и соосным блокированием двух двигателей общим валом. Если допустимая мощность для трансмиссии меньше мощности двух двигателей, то предпочтительнее схема на рис. 23.29, б, где каждая из трансмиссий передает мощность одного двигателя на общий трансмиссионный вал.
2. Допустимая частота вращения блокирующей трансмиссии. Если частота вращения двигателя превышает значение, допустимое для трансмиссии, то предпочтительна схема на рис. 23.24, в, где блокирование выполнено зубчатым редуктором, для которого допустимая частота вращения больше частоты вращения двигателей.
3. Мощность двух двигателей недостаточна. В этом случае можно использовать третий двигатель (рис. 23.24, г) с передачей мощности отдельной трансмиссией на общий вал.
Электродвигатели постоянного тока и реже асинхронные переменного тока блокируют (до четырех) на одну трансмиссию. Это позволяет варьировать мощность, обеспечивать необходимую надежность и снижать маховые массы, что увеличивает гибкость силового привода.
Возможность вала электродвигателя вращаться в любую сторону упрощает конструктивное решение трансмиссии и не требует передачи обратного хода.
В буровых установках для скважин глубиной до 7000 м применяют силовой электромашинный привод постоянного тока лебедки и буровых насосов. В этих случаях лебедка приводится от двух соосно сблокированных электродвигателей постоянного тока мощностью 800 кВт каждый, с номинальной частотой вращения 1100 мин-1 (напряжение 830 В, сила тока 960 А). Буровые насосы имеют индивидуальный привод от таких же элек-
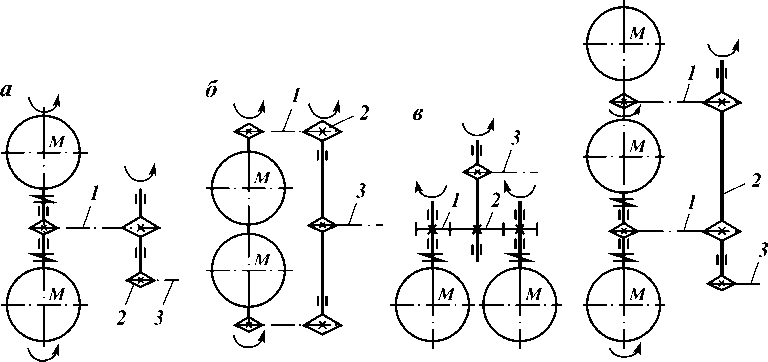
Рис. 23.24. Схемы блокирования электродвигателей:
а — соосное расположение двух двигателей, блокирование общим валом; б — соосное расположение, блокирование гибкой связью двух двигателей на трансмиссионный вал; в — параллельное блокирование двух двигателей зубчатой передачей; г — соосное расположение, комбинированное блокирование; 1 — гибкая связь — цепная или клиноременная передача; 2 — трансмиссионный вал лебедки или насоса; 3 — передача на исполнительный механизм; М — электродвигатель
тродвигателей, с питанием их от шести генераторов, последовательно сблокированных соосно по два и приводимых от трех дизелей.
Электродвигатели постоянного тока большой мощности следует соединять с трансмиссией непосредственно, так как они допускают пуск под нагрузкой. Мощные электродвигатели переменного тока, обладая большой маховой массой якоря, при пуске под нагрузкой требуют больших пусковых токов; при этом возникают большие динамические нагрузки вследствие малого периода разгона. В таких случаях необходимо устанавливать между двигателем и трансмиссией фрикционную муфту, что улучшает пусковые качества. В этих случаях целесообразно применять также электродинамические или гидравлические муфты взамен фрикционных. Эти муфты при скольжении 15-30 % улучшают параллельную работу насосов, и применение их в ряде случаев более рационально, однако все эти устройства усложняют трансмиссию по сравнению с приводом от электродвигателя постоянного тока.
При необходимости передачи больших мощностей между валами для уменьшения массы, размеров и мощности, передаваемой каждой передачей, применяют привод от соосно расположенных, но несблокированных между собой двух электродвигателей, передающих на трансмиссионный вал мощность двумя цепными или клиноременными передачами. Такие конструкции начали применять в связи с созданием электродвигателей с охлаждением. Например, при таком решении удается в 1,5-2 раза уменьшить массу блока двигатель - насос, установив двигатель под насосом или за ним. Это обеспечивает большую компактность конструкции, что особенно важно при ограниченности площади, например для плавучих буровых установок или установок для кустового бурения. Недостаток такой конструкции — небольшое расстояние между осями валов двигателя и насоса и почти вертикальное расположение цепной трансмиссии, что снижает ее долговечность.
Пример параллельного блокирования четырех электродвигателей постоянного тока на общий вал привода лебедки приведен на рис. 23.25. Двигатели сблокированы через редуктор с зубчатой шевронной передачей по два с каждой стороны от барабана буровой лебедки. Это конструктивное решение удачное, так как не требуются коробка передач и фрикционные муфты между двигателями и блокирующим редуктором.
Привод от ДВС. В буровых установках, рассчитанных на бурение сравнительно неглубоких скважин (1000-1500 м), рекомендуют применять блок из одного-двух двигателей общей мощностью до 600 кВт. При этом оси ДВС и валов лебедок следует располагать параллельно во избежание применения конических зубчатых передач. В буровых установках для бурения глубоких скважин три или четыре двигателя располагают линейно или группами также параллельно осям валов лебедки. Поперечное расположение более двух двигателей усложняет конструкцию трансмиссии и компоновку оборудования буровой установки.
На рис. 23.26 даны схемы блокирования двигателей, применяемые в силовых приводах. Недостаток схемы с линейным расположением двух двигателей и приводом насоса от общего вала (рис. 23.26, а) - передача всей мощности через привод общего вала насосов. На рис. 23.26, б приве-
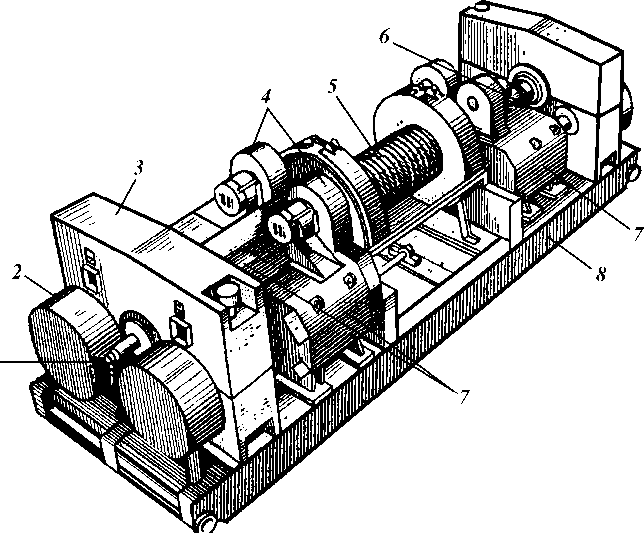
Рис. 23.25. Привод буровой лебедки от четырех электродвигателей постоянного тока мощностью по 750 кВт, сблокированных зубчатыми передачами:
1 — вертлюг подачи воды к тормозу лебедки; 2 — инерционный тормоз двигателя; 3 — зубчатый редуктор; 4 — вентилятор охлаждения; 5 — барабан лебедки; 6 — вал барабана лебедки; 7 — электродвигатель постоянного тока; 8 — рама
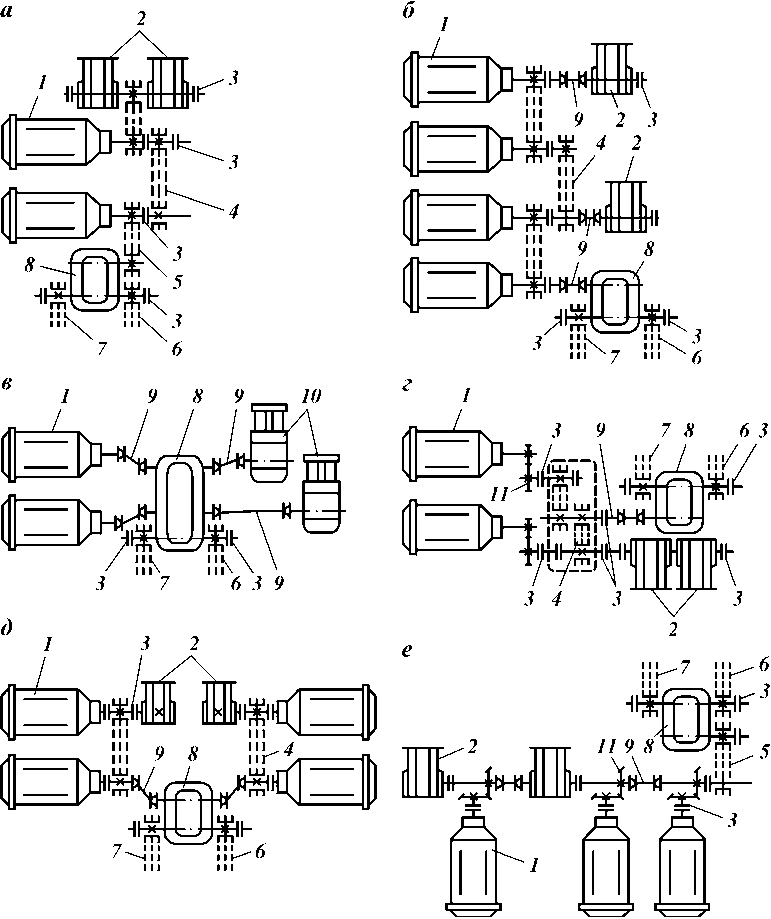
Рис. 23.26. Схемы параллельного блокирования ДВС в групповых приводах:
I - ДВС; 2 - трансмиссия привода насоса; 3 - фрикционная муфта; 4 - блокирующая трансмиссия; 5 - трансмиссия привода коробки передач; 6, 7 - трансмиссии привода лебедки («быстрая» и «тихая»); 8 - коробка передач; 9 - карданный вал; 10 - буровой насос;
II - редуктор зубчатый конический
дена аналогичная схема линейного расположения четырех двигателей с раздельный отбором мощности на привод каждого насоса. Привод, выполненный по этой схеме, более маневренный. Такие схемы целесообразно применять в силовых приводах с четырьмя двигателями. При двух и трех двигателях лучше использовать первую схему, при четырех -вторую.
В мощных установках ДВС лучше блокировать цепными передачами, а в установках небольшой мощности - клиноременными. При желании избежать цепных передач или уменьшить их число силовые блоки выполняют по схемам на рис. 23.26, в и г.
Двигатели можно блокировать карданными и зубчатыми передачами (рис. 23.26, в). При быстроходных ДВС для снижения скоростей движения цепей применяют зубчатые редукторы (рис. 23.26, г), однако это усложняет конструкцию.
По схеме на рис. 23.26, д четыре двигателя сблокированы в виде отдельных двухдвигательных блоков с передачей мощности к коробке карданными валами. В этой схеме двигатели имеют правое и левое направления вращения, что применять не рекомендуют, так как при этом нужны ДВС специального исполнения. В двигателях с одним направлением вращения в одной из блокирующих передач используют зубчатые редукторы или поворачивают двигатели на 180°.
Блокирование двигателей коническими зубчатыми передачами и карданными валами (рис. 23.26, е) можно применять, когда отсутствуют качественные цепи.
Все механизмы силовых приводов для удобства монтажа необходимо монтировать на общей сварной раме из нескольких продольных блоков, соединенных поперечными траверсами.
Во всех рассмотренных схемах можно использовать турбо- и электромуфты или турботрансформаторы.
Блокирующие трансмиссии с электроприводом постоянного тока имеют более простую конструкцию, чем приводы с механическим блокированием ДВС, однако весь комплекс привода не менее сложен.
На рис. 23.27 показана компоновка силового привода с четырьмя ДВС общей мощностью 1000 кВт, сблокированными трансмиссией с втулочнороликовыми цепями, с раздельным приводом двух насосов клиноременными передачами.
Цепные передачи силовых приводов работают при высоких частотах вращения (1000-1200 мин-1) и передают большие мощности, в ряде случаев до 2000 кВт на один вал. Для работы в таких условиях цепные передачи необходимо монтировать в жестких сварных герметичных корпусах и обеспечивать обильное смазывание для охлаждения трансмиссии. Такие конструкции требуют точного центрирования валов и двигателей с трансмиссией для обеспечения их соосности.
Для облегчения монтажа двигателей и улучшения работы трансмиссии валы двигателей и трансмиссий следует соединять короткими карданными валами. Последние позволяют передавать большие мощности и значительно упрощать монтаж агрегатов. Использовать клиноременную передачу для блокирования мощных двигателей не рекомендуют, так как это решение не позволяет блокировать одновременно более двух двигателей из-за необходимости периодического смещения их осей для натяжения ремней. Это очень сложно осуществлять в трансмиссиях с числом блокируемых валов более двух.
Все механизмы и блоки с двигателями силового привода следует монтировать на общей раме из нескольких продольных балок, соединенных поперечными траверсами. Раму лучше выполнять сварной из профильного
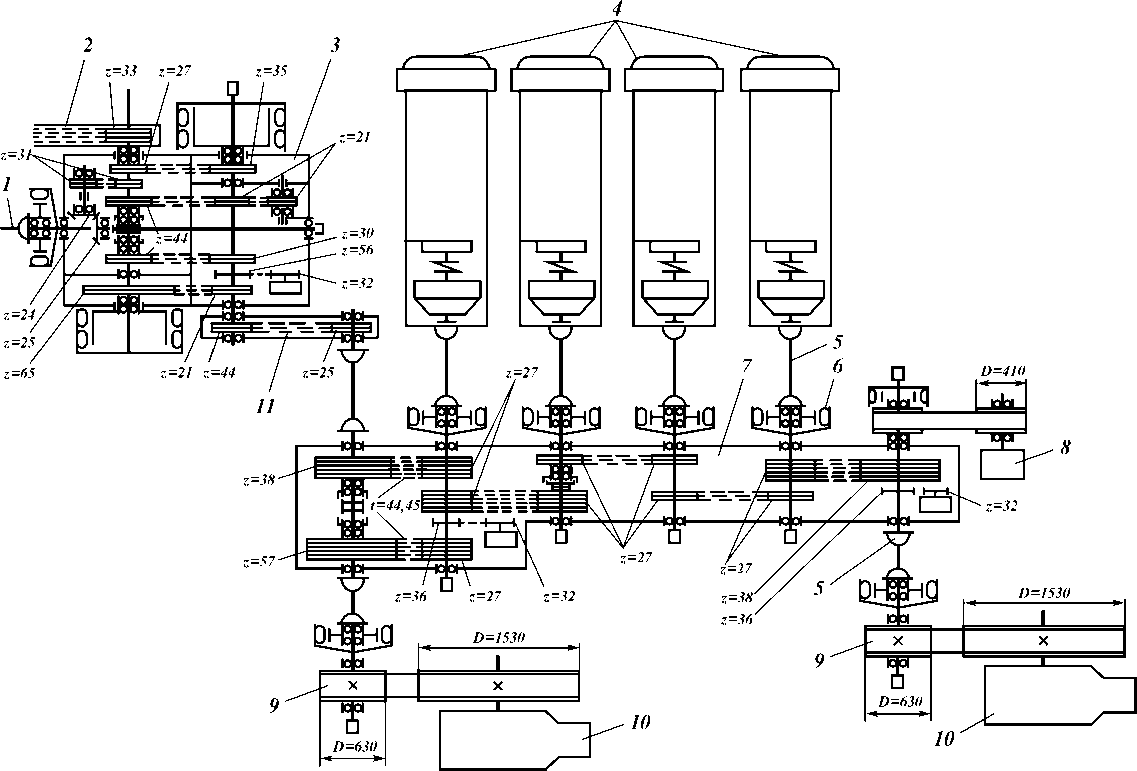
Рис. 23.27. Кинематическая схема четырехдизельного группового силового привода с карданными валами и цепной блокирующей трансмиссией:
1 — вал привода ротора; 2 — трансмиссия лебедки; 3 — коробка передач; 4 — ДВС; 5 — карданный вал; 6 — фрикционная муфта ШПМ-500; 7 — блокирующая цепная трансмиссия; 8 — компрессор; 9 — клиноременная передача привода насосов; 10 — буровые насосы; 11 — цепная трансмиссия привода коробки передач
проката или полосовой стали, а концевые траверсы - из труб. Нижний полоз рамы надо загибать вверх в виде салазок для облегчения погрузки или перевозки волоком по промыслу.
Когда мощность группового дизельного блока недостаточна для привода мощных насосов, применяют индивидуальный привод от ДВС, а иногда и индивидуальный привод ротора.
Комбинированный дизель-электрический привод. Для повышения общего КПД или увеличения мощности дизель-электрического привода в установках его можно выполнять комбинированным (рис. 23.28). В таком
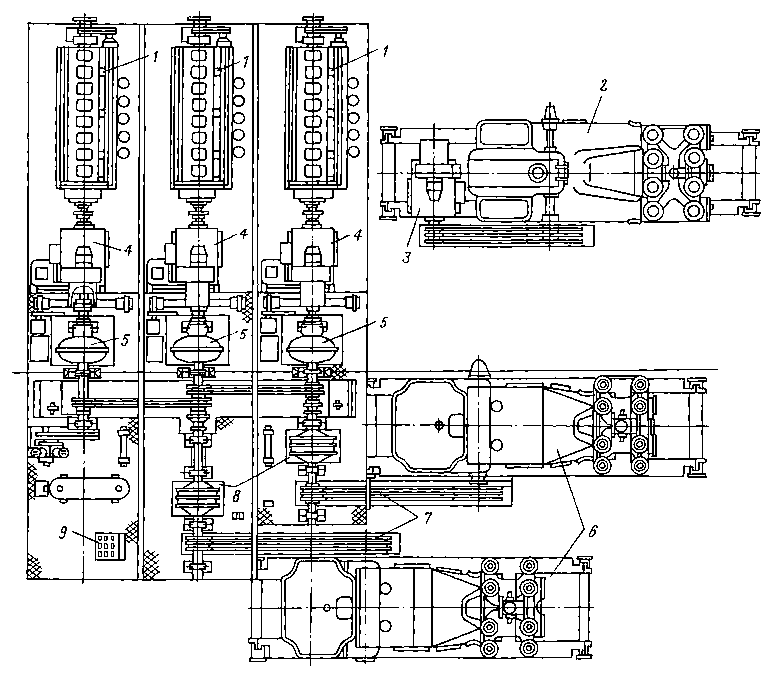
Рис. 23.28. Комбинированный дизель-электрогидравлический привод:
1 — ДВС; 2 — вспомогательный насос; 3 — электродвигатель вспомогательного насоса; 4 — генератор постоянного тока; 5 — турбомуфта; 6 — буровой насос; 7 — цепная трансмиссия насоса; 8 — фрикционная пневмомуфта; 9 — пульт управления
приводе буровые насосы приводятся через турбомуфты от привода, в котором дизели сблокированы цепной передачей. Генераторы мощностью 550 кВт каждый соединены непосредственно с валами дизелей и вращаются с частотой 1050 мин-1. Лебедка, ротор и вспомогательный насос приводятся от электродвигателей постоянного тока, питаемых от этих генераторов. Такая конструкция более сложна, чем прямой привод насосов от электродвигателей, однако по сравнению с полностью электрифицированной установкой позволяет повысить общий КПД.
Ряд технологических преимуществ силовых приводов постоянного тока, большая их надежность в эксплуатации и долговечность делают этот тип привода пригодным для буровых установок всех типов при различных глубинах бурения.
